In [1]: dump_errors(odrv0)
axis0
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
In [2]: dump_errors(odrv0)
axis0
axis: Error(s):
AXIS_ERROR_ENCODER_FAILED
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: Error(s):
ENCODER_ERROR_ILLEGAL_HALL_STATE
controller: no error
axis1
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
if i used the second motor one of them becomes the error. I cant use two hoverboard motors.?
can anybody help please?!
Please connect your ODrive.
You can also type help() or quit().
In [1]: dump_errors(odrv0)
axis0
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
In [2]: odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
In [3]: odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
In [4]: odrv0.axis0.controller.input_vel = 1
In [5]: dump_errors(odrv0)
axis0
axis: Error(s):
AXIS_ERROR_MOTOR_FAILED
motor: Error(s):
MOTOR_ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
In [6]: odrv0.axis1.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
In [7]: odrv0.axis1.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
In [8]: odrv0.axis1.controller.input_vel = 1
In [9]: dump_errors(odrv0)
axis0
axis: Error(s):
AXIS_ERROR_MOTOR_FAILED
motor: Error(s):
MOTOR_ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
axis1
axis: Error(s):
AXIS_ERROR_INVALID_STATE
AXIS_ERROR_MOTOR_FAILED
motor: Error(s):
MOTOR_ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
“Phase resistance out of range” means you either have a bad motor, or a wiring problem. Sometimes it’s because you’re commanding axis0 and the motor is actually connected to axis1 (or vice-versa)
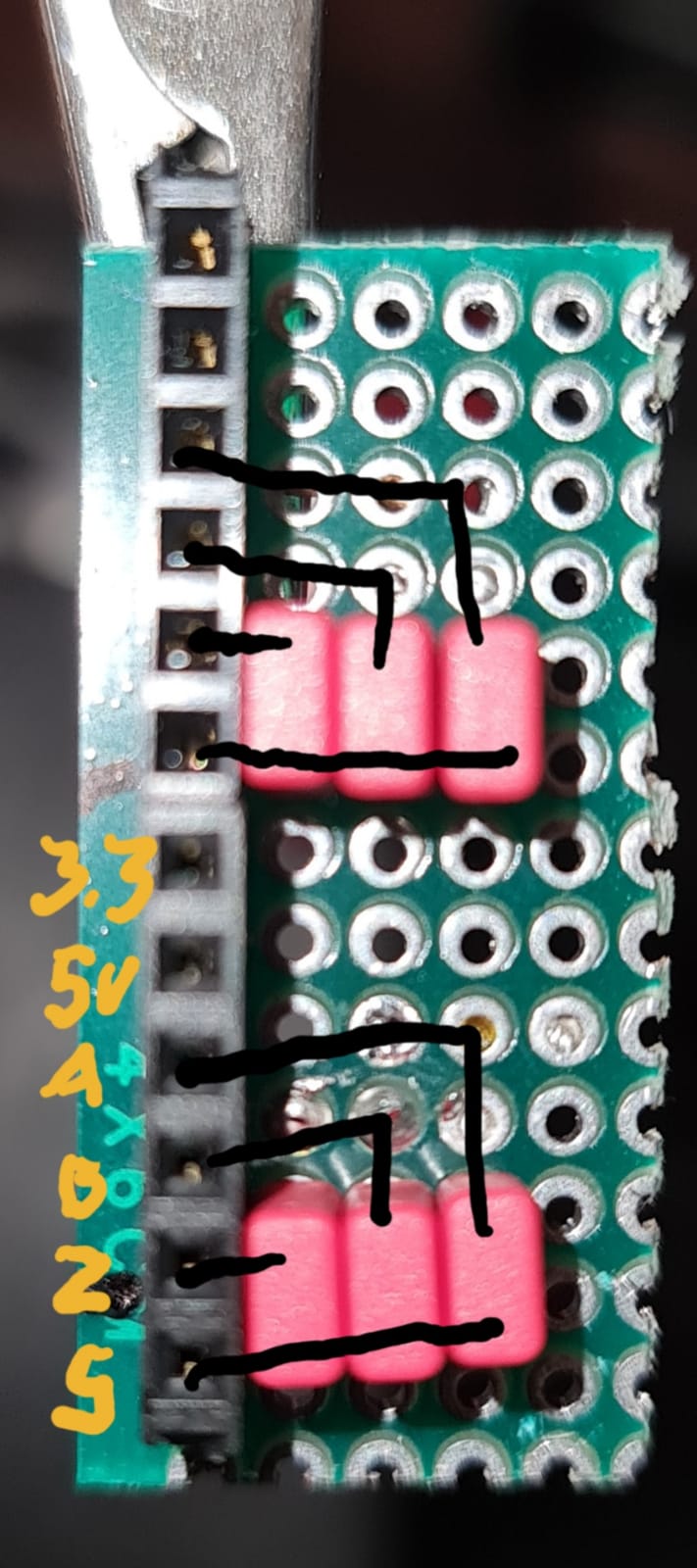
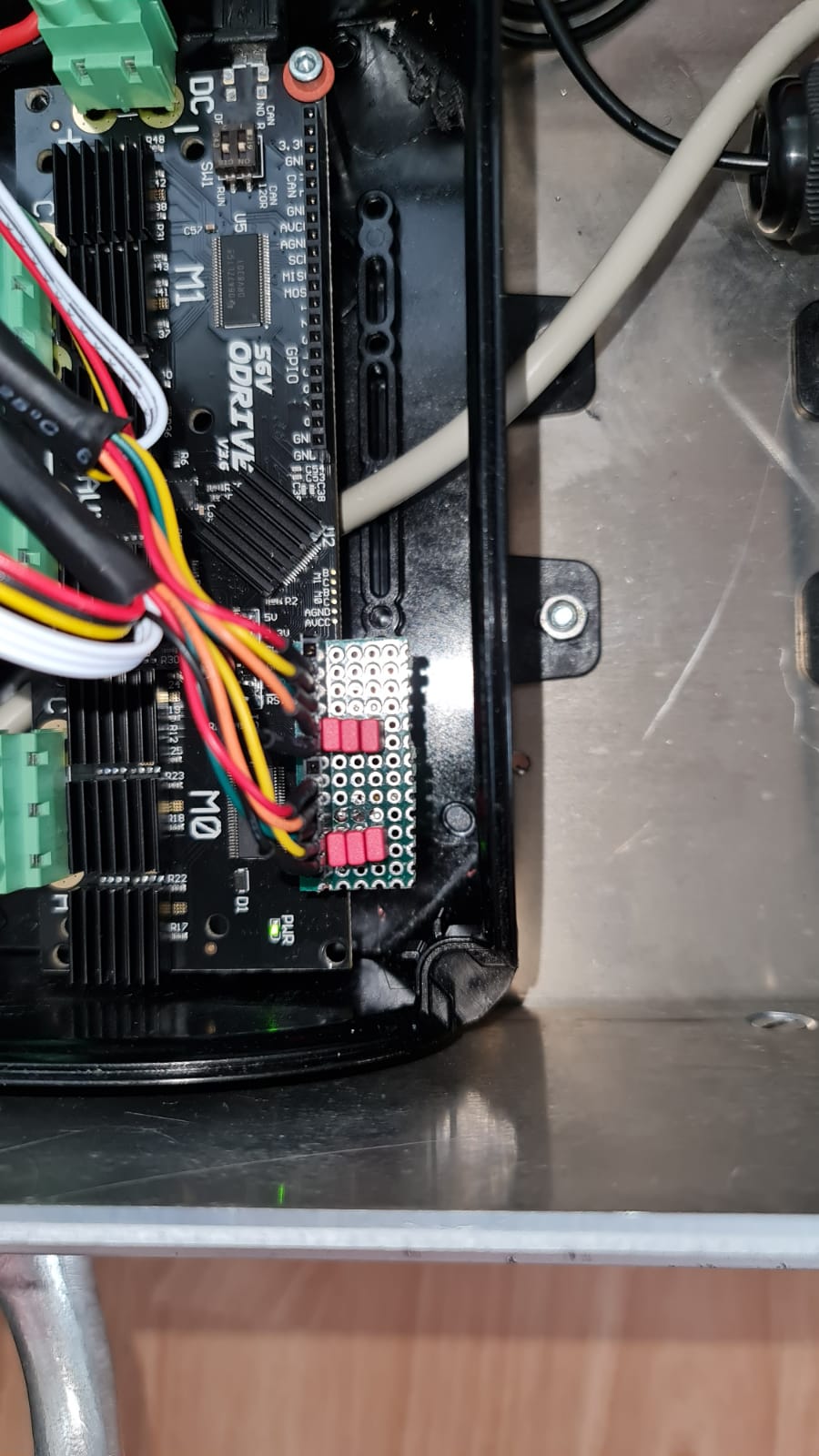
Thanks, but I am wondering, I just put the board with the capacitors between the pins. I didn’t change any wire ring. And if I put it out I have the same problem.
By robby
It could have been just on the edge of working at the default calibration voltage.
See this thread where someone had a PHASE_RESISTANCE_OUT_OF_RANGE error and fixed it by increasing resistance_calib_max_voltage.