@towen I am kind of lost my mind because the error state is not consistence while the drive reconnected after a save_configuration() command
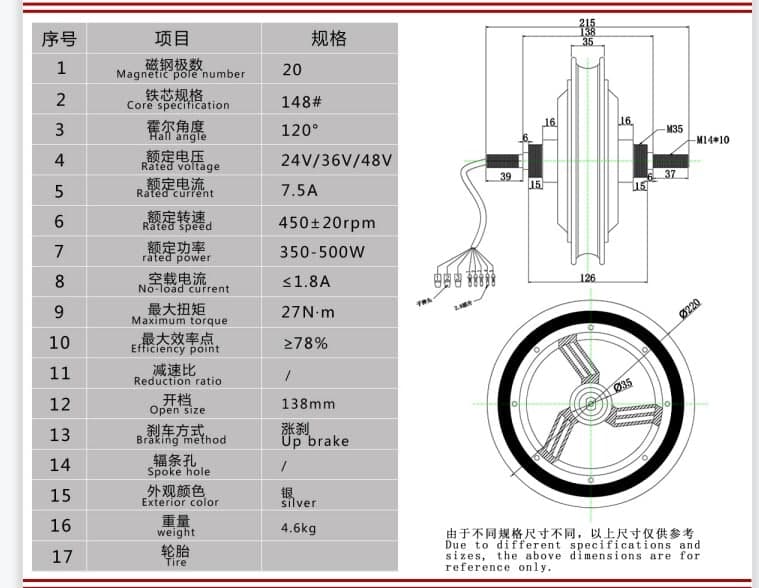
I got to know that the motor has 20 magnets so I devidied it by 2 as recommended, so the pole_pairs = 10 and I put the cpr = 8192 and that seems the Encoder error resolved at some points but I am exactly could track of that whether that was because the drive got reconnected or not.
I am getting other HALL error "ENCODER_ERROR_ILLEGAL_HALL_STATE "while adding encoder.config values. Do I need add an external Encoder like the one availavle in Odrive store?
here is some config attempts and their output. Sorry, its a big one.
In [24]: odrv0.axis0.motor
Out[24]:
DC_calib_phA: 1.0643467903137207 (float)
DC_calib_phB: -0.30078402161598206 (float)
DC_calib_phC: -0.7636010050773621 (float)
I_bus: 0.0 (float)
config:
I_bus_hard_max: inf (float)
I_bus_hard_min: -inf (float)
I_leak_max: 0.10000000149011612 (float)
R_wL_FF_enable: False (bool)
acim_autoflux_attack_gain: 10.0 (float)
acim_autoflux_decay_gain: 1.0 (float)
acim_autoflux_enable: False (bool)
acim_autoflux_min_Id: 10.0 (float)
acim_gain_min_flux: 10.0 (float)
bEMF_FF_enable: False (bool)
calibration_current: 10.0 (float)
current_control_bandwidth: 100.0 (float)
current_lim: 10.0 (float)
current_lim_margin: 8.0 (float)
dc_calib_tau: 0.20000000298023224 (float)
inverter_temp_limit_lower: 100.0 (float)
inverter_temp_limit_upper: 120.0 (float)
motor_type: 0 (uint8)
phase_inductance: 0.00027972811949439347 (float)
phase_resistance: 0.19126087427139282 (float)
pole_pairs: 10 (int32)
pre_calibrated: False (bool)
requested_current_range: 25.0 (float)
resistance_calib_max_voltage: 4.0 (float)
torque_constant: 0.30000001192092896 (float)
torque_lim: inf (float)
current_control:
I_measured_report_filter_k: 1.0 (float)
Ialpha_measured: 0.0 (float)
Ibeta_measured: 0.0 (float)
Id_measured: 0.0 (float)
Id_setpoint: 0.0 (float)
Iq_measured: 0.0 (float)
Iq_setpoint: 0.0 (float)
Vd_setpoint: 0.0 (float)
Vq_setpoint: 0.0 (float)
final_v_alpha: 0.0 (float)
final_v_beta: 0.0 (float)
i_gain: 19.126087188720703 (float)
p_gain: 0.027972811833024025 (float)
phase: 0.0 (float)
phase_vel: 0.0 (float)
power: 0.0 (float)
v_current_control_integral_d: 0.0 (float)
v_current_control_integral_q: 0.0 (float)
current_meas_phB: 0.30271321535110474 (float)
effective_current_lim: 10.0 (float)
error: 0 (uint64)
temperature: 31.108919143676758 (float)
is_armed: False (bool)
is_calibrated: True (bool)
last_error_time: 0.0 (float)
max_allowed_current: 30.375 (float)
max_dc_calib: 3.0375001430511475 (float)
motor_thermistor:
config: ...
temperature: 0.0 (float)
n_evt_current_measurement: 1571465 (uint32)
n_evt_pwm_update: 1571470 (uint32)
phase_current_rev_gain: 0.012500000186264515 (float)
In [25]: odrv0.axis0.motor.config.pre_calibrated = True
In [26]: odrv0.save_configuration()
Oh no odrv0 disappeared
Reconnected to ODrive 2062356E5748 as odrv0
In [27]: odrv0.axis0.requested_state = AXIS_STATE_ENCODER_HALL_POLARITY_CALIBRATION
Oh no odrv0 disappeared
In [29]: dump_errors(odrv0, True)
system: no error
axis0
axis: no error
motor: no error
sensorless_estimator: no error
encoder: Error(s):
ENCODER_ERROR_ILLEGAL_HALL_STATE
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
Reconnected to ODrive 2062356E5748 as odrv0
In [28]: odrv0.axis0.encoder
Out[28]:
calib_scan_response: 0.0 (float)
config:
abs_spi_cs_gpio_pin: 1 (uint16)
bandwidth: 100.0 (float)
calib_range: 0.019999999552965164 (float)
calib_scan_distance: 150.0 (float)
calib_scan_omega: 12.566370964050293 (float)
cpr: 8192 (int32)
direction: -1 (int32)
enable_phase_interpolation: True (bool)
find_idx_on_lockin_only: False (bool)
hall_polarity: 0 (uint8)
hall_polarity_calibrated: False (bool)
ignore_illegal_hall_state: False (bool)
index_offset: 0.0 (float)
mode: 1 (uint16)
phase_offset: 0 (int32)
phase_offset_float: 0.0 (float)
pre_calibrated: False (bool)
sincos_gpio_pin_cos: 4 (uint16)
sincos_gpio_pin_sin: 3 (uint16)
use_index: False (bool)
use_index_offset: True (bool)
count_in_cpr: 0 (int32)
delta_pos_cpr_counts: 0.0 (float)
error: 16 (uint16)
hall_state: 5 (uint8)
index_found: False (bool)
interpolation: 0.5 (float)
is_ready: False (bool)
phase: 0.0 (float)
pos_abs: 0 (int32)
pos_circular: 0.0 (float)
pos_cpr_counts: 0.0 (float)
pos_estimate: 0.0 (float)
pos_estimate_counts: 0.0 (float)
set_linear_count(obj: object_ref, count: int32)
shadow_count: 0 (int32)
spi_error_rate: 0.0 (float)
vel_estimate: 0.0 (float)
vel_estimate_counts: 0.0 (float)
After a save_config, the error went away, probably the odrive got reconnected then
In [33]: odrv0.axis0.encoder
Out[33]:
calib_scan_response: 0.0 (float)
config:
abs_spi_cs_gpio_pin: 1 (uint16)
bandwidth: 100.0 (float)
calib_range: 0.019999999552965164 (float)
calib_scan_distance: 150.0 (float)
calib_scan_omega: 12.566370964050293 (float)
cpr: 8192 (int32)
direction: -1 (int32)
enable_phase_interpolation: True (bool)
find_idx_on_lockin_only: False (bool)
hall_polarity: 0 (uint8)
hall_polarity_calibrated: False (bool)
ignore_illegal_hall_state: False (bool)
index_offset: 0.0 (float)
mode: 1 (uint16)
phase_offset: 0 (int32)
phase_offset_float: 0.0 (float)
pre_calibrated: False (bool)
sincos_gpio_pin_cos: 4 (uint16)
sincos_gpio_pin_sin: 3 (uint16)
use_index: False (bool)
use_index_offset: True (bool)
count_in_cpr: 0 (int32)
error: 0 (uint16)
index_found: False (bool)
is_ready: False (bool)
pos_abs: 0 (int32)
pos_circular: 0.0 (float)
pos_cpr_counts: 0.0 (float)
pos_estimate: 0.0 (float)
pos_estimate_counts: 0.0 (float)
set_linear_count(obj: object_ref, count: int32)
shadow_count: 0 (int32)
spi_error_rate: 0.0 (float)
vel_estimate: 0.0 (float)
vel_estimate_counts: 0.0 (float)
In [34]:
In [34]: odrv0.axis0.encoder.config.pre_calibrated = True
In [35]: odrv0.save_configuration()
Oh no odrv0 disappeared
Reconnected to ODrive 2062356E5748 as odrv0
In [36]: odrv0.reboot()
Oh no odrv0 disappeared
Reconnected to ODrive 2062356E5748 as odrv0
In [37]: odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
In [38]: dump_errors(odrv0, True)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_UNKNOWN_PHASE_ESTIMATE
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
In [39]: odrv0.axis0.controller.input_vel = 2
In [40]: dump_errors(odrv0, True)
system: no error
axis0
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error