i got a problem.
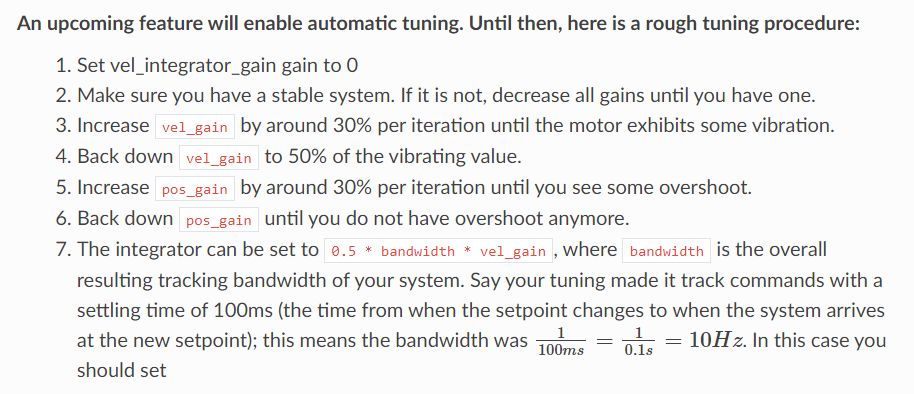
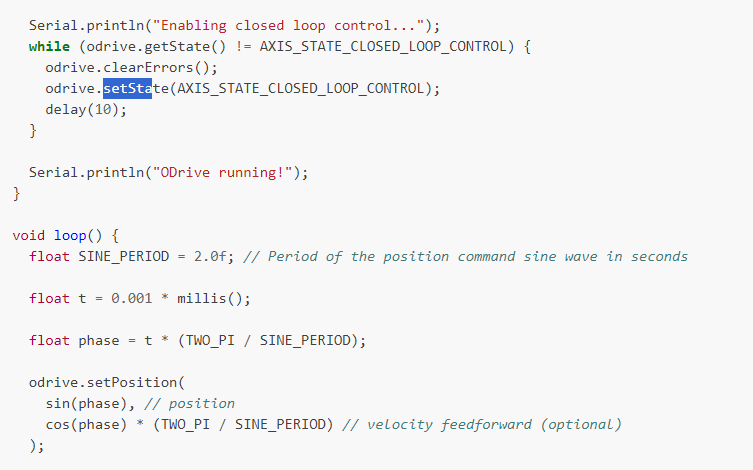
since i’m going to use Arduino, i changed my Odrive’s configuration.
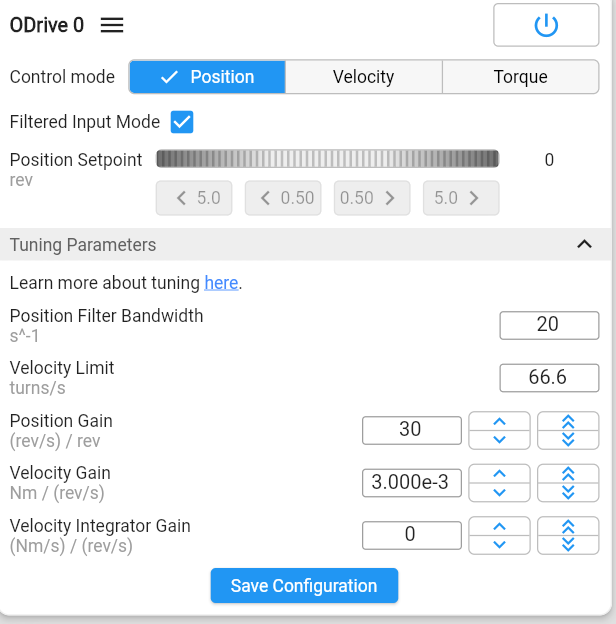
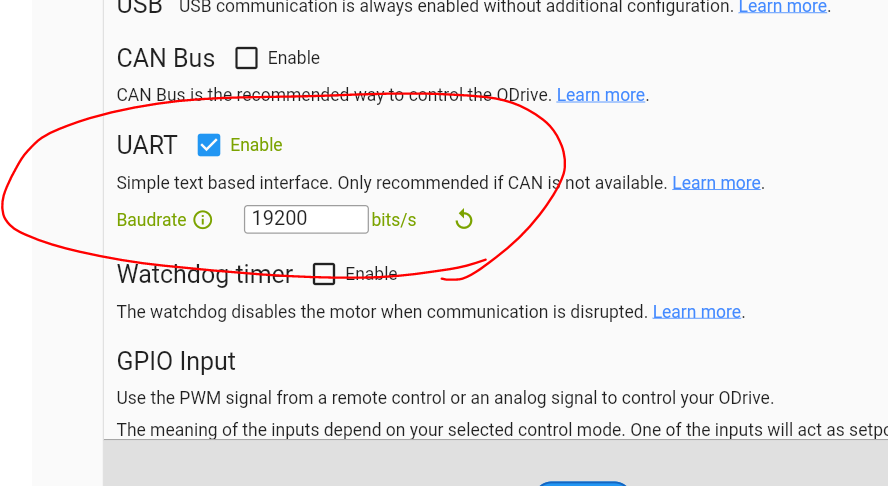
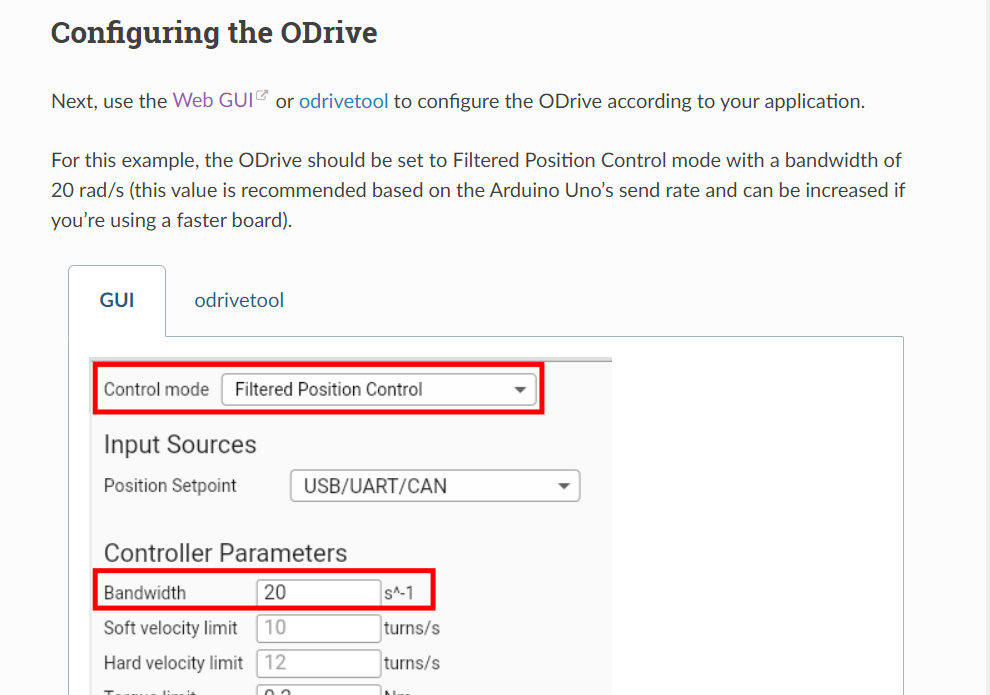
i just changed UART option enable and control mode as filtered position control like below.
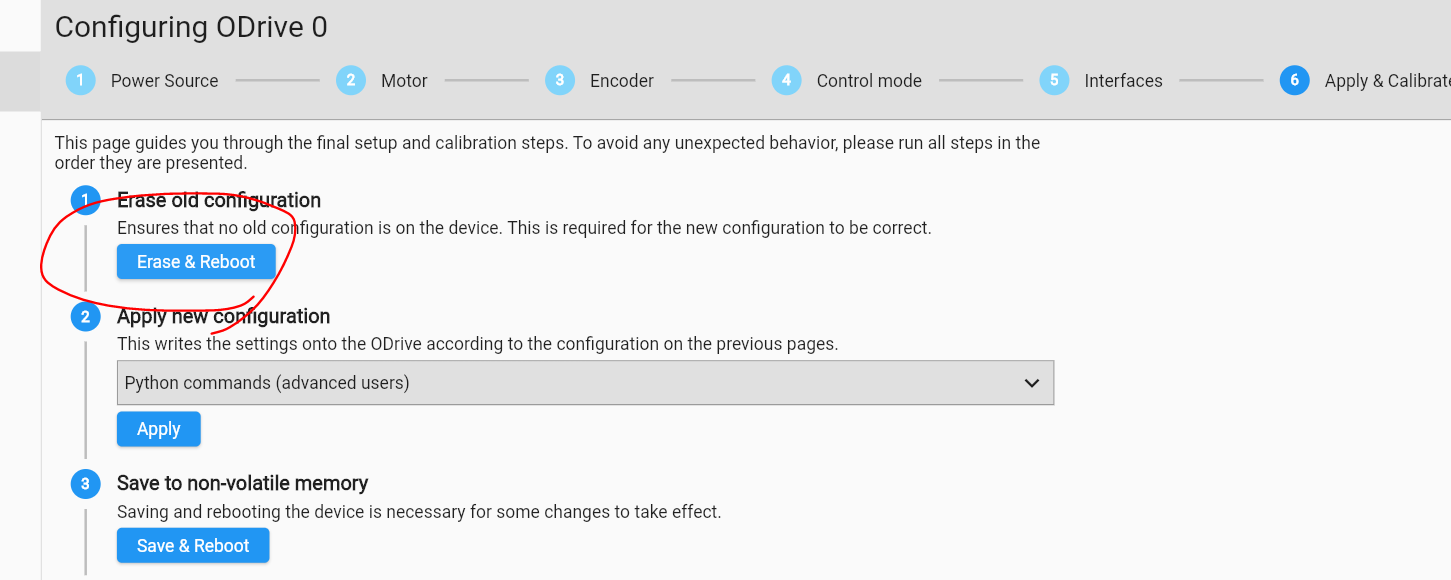
but, by changing the configuration, my previous setting like gain values was disappeared.
(because when changing settings, it requires erasing process i think.)
anyway, since i lost my previous setting, i tried to re-calibrate my motor.
but, doing so, i encountered a phenomenon which i haven’t seen previous time.
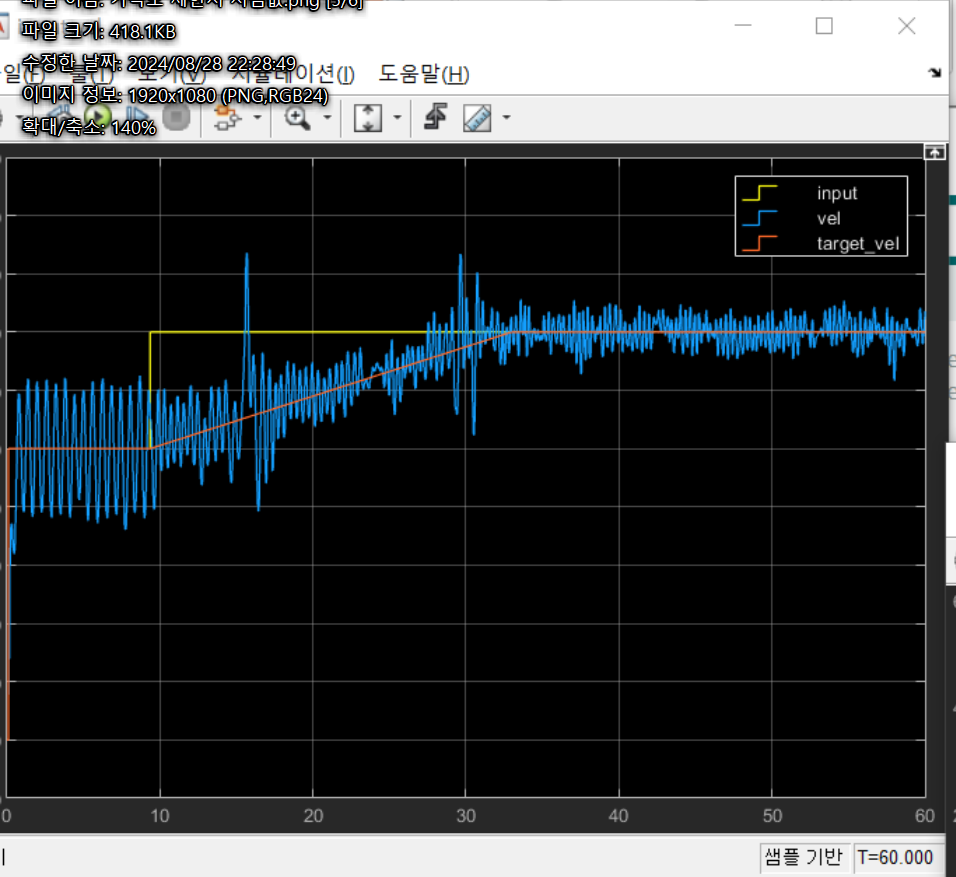
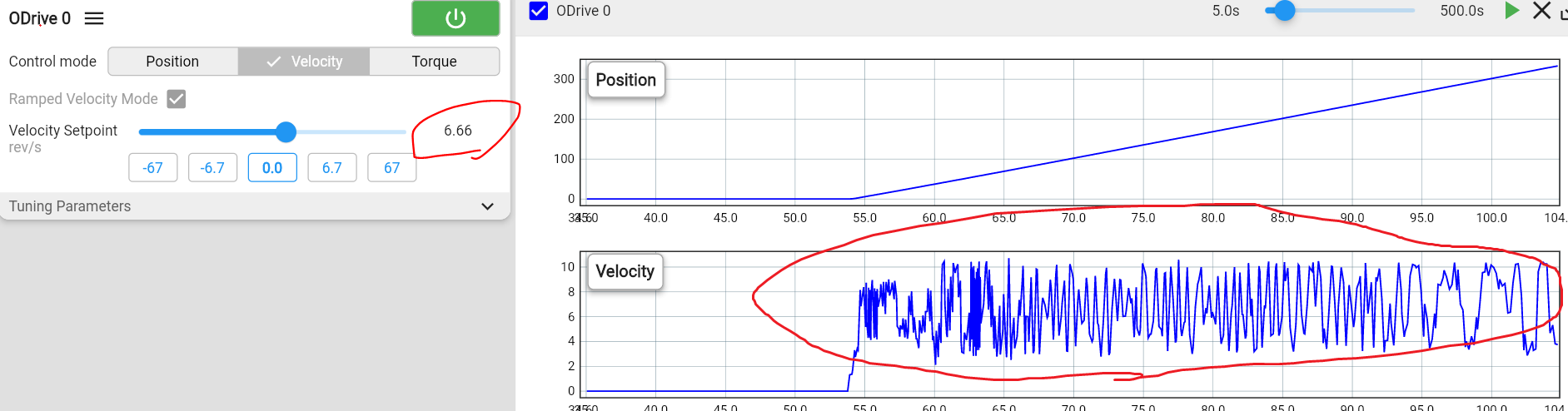
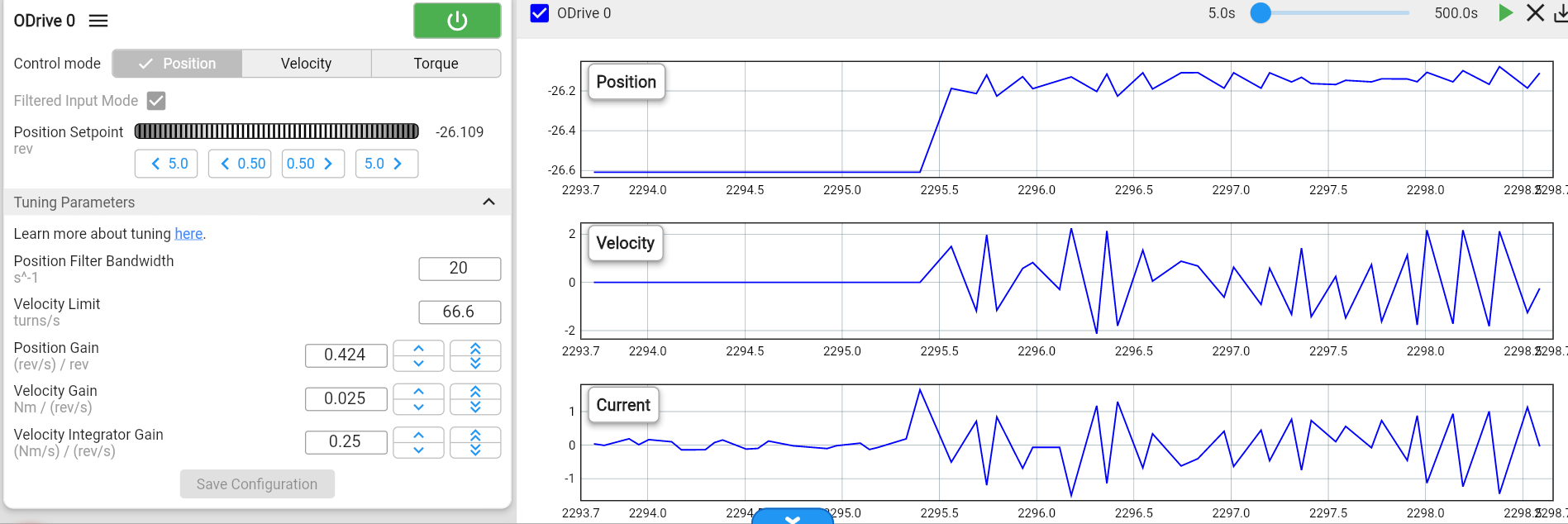
motor couldn’t go to the position setpoint.
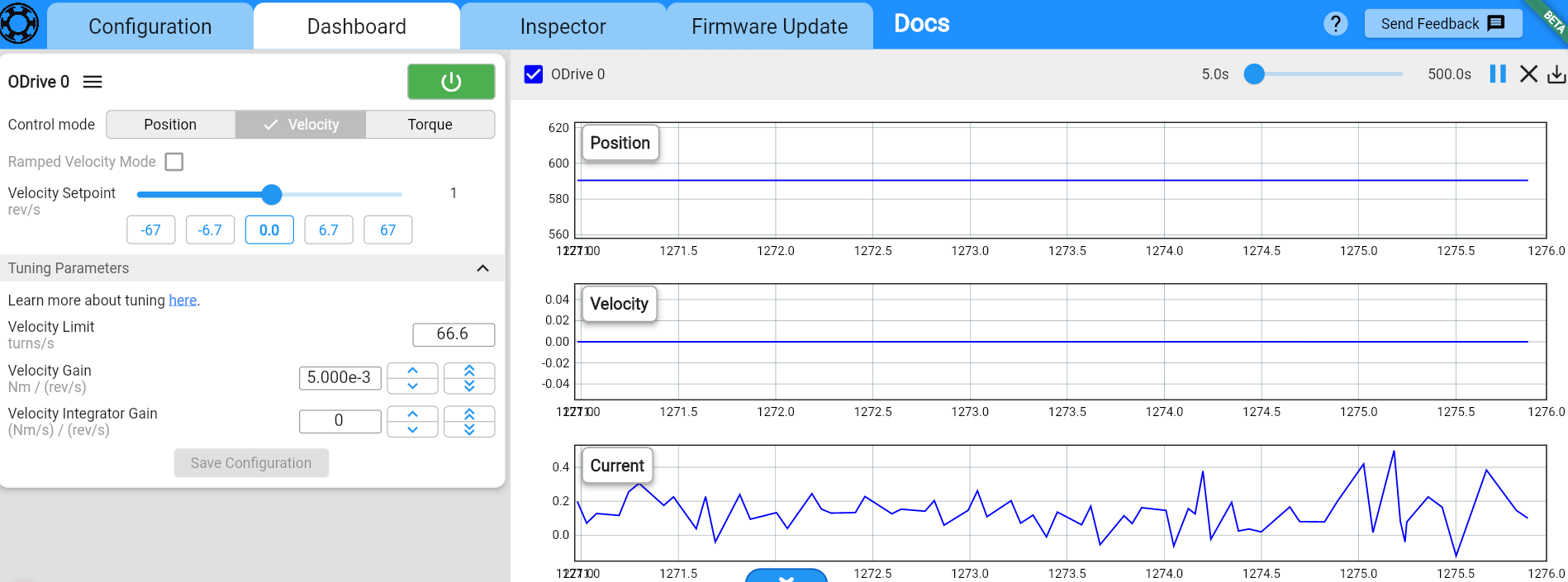
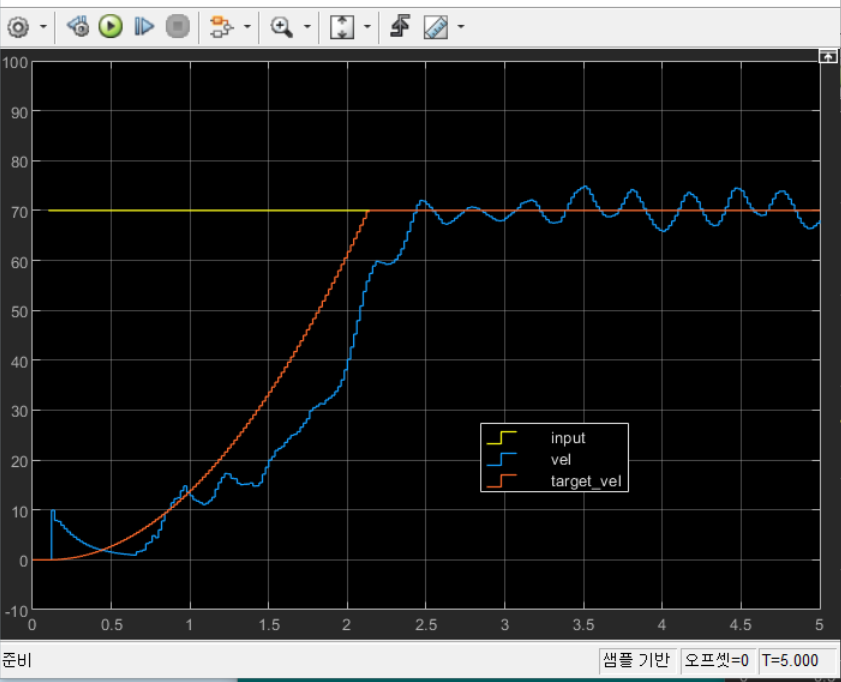
it vibrates near the setpoint like an image below.
it doesn’t be seen when i use velocity control
so, i thought some causes which make problem.
please help clearing this problem.
(i also tried with intergrator factor 0)
- position gain value
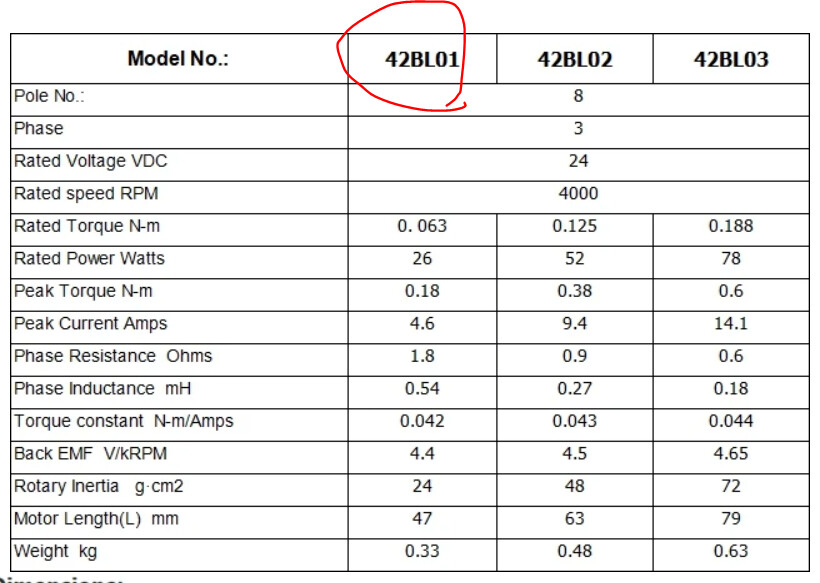
- hall sensor’s resolution issue
(= the setpoint i set was the place that can’t be expressed with the hall sensor i use because it has too low resolution) - control mode issue (=because of the difference between the ‘filtered position control’ and others)
and, i think the main cause is 3rd one.
→ is it possible to solve the problem if i change the control mode to velocity control?
[1]
i wrote first factor because i used position gain as 30 prevous time.
(i used gains as 30, 8.75m, 1.75m for pos gain, vel gain, integrator gain)
but i’ve been always thinking that 30 was too high, so i changed it via this time.
anyway, i increased it up to 20 to verify, but the vibrating wasn’t disappeared.
so i don’t think this is the cause.
[2]
then, i also do not think hall sensor is the problem.
because i haven’t seen the pheonomenon at previous time.
i didn’t changed my sensor.
[others]
i have other questions apart from this problem.
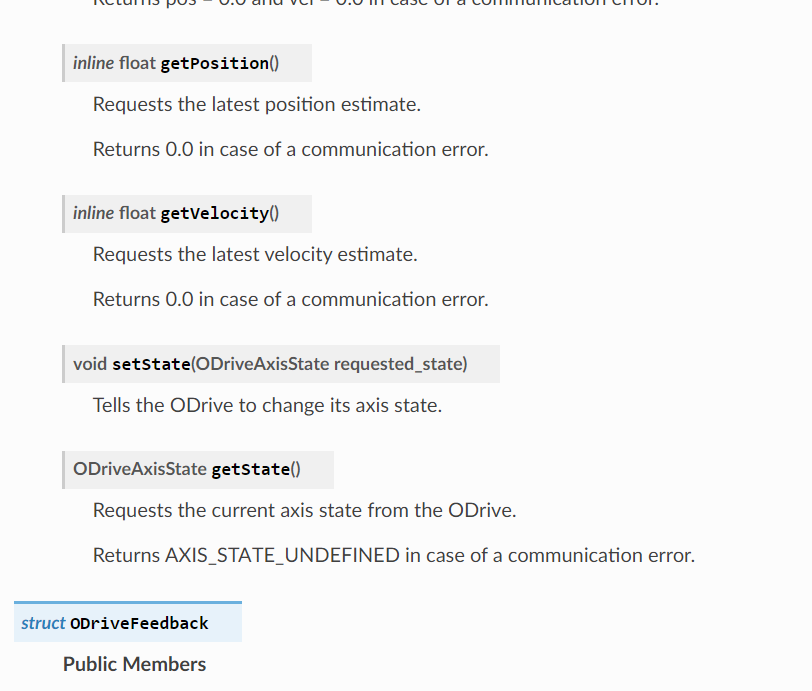
- can i change the control mode in Arduino? (ex. pos control mode → vel control mode)
- can i set the Odrive as IDLE in Arduino?
and also can change from IDLE to any control mode? (=can i make it ‘wake-up’ when it is IDLE?) - only ‘filtered position mode’ can be used when using Arduino?