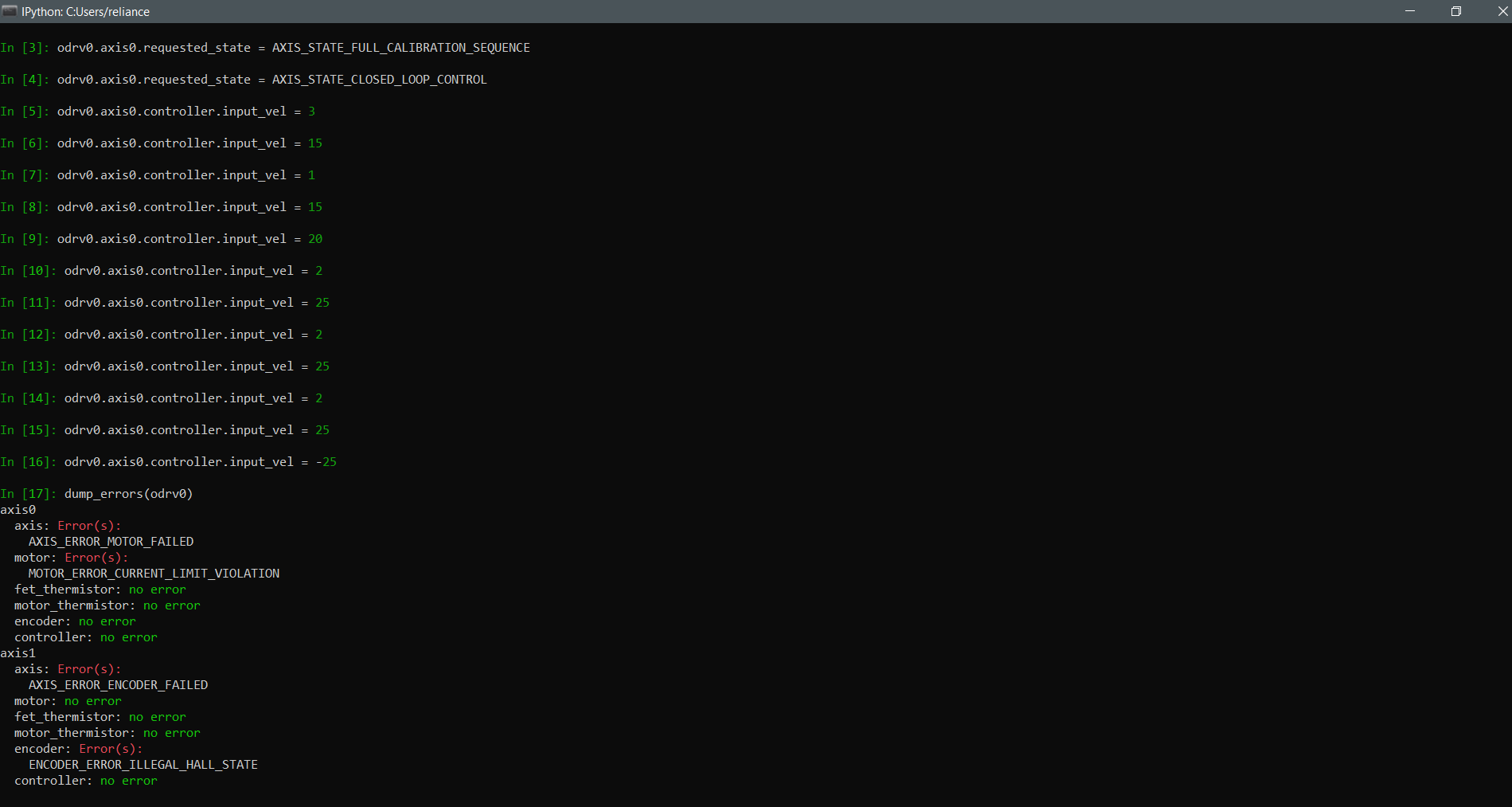
I had recently reloaded the firmware to odrive v3.5 24V. After setting basic parameters I started the calibration sequence which looks alright put in closed-loop which getts FAIL down. So then it shows an error of ERROR_DC_BUS_OVER_REGEN_CURRENT so I set parameters like odrv. config.dc_max_negative_current. after that, it gets in close-loop but as I started to write velocity setpoint after some point it gets out of close-loop control so I use dump_errors(odrv0) command and there I got a new error that violation of current limit and I need to calibrate every time. So please help me ASAP.
It sounds like your encoder may be slipping if you find yourself having to re-calibrate every time.
Then what should I do? I reset bandwidth to the default value 1000. I also changed the current margin and set the pre-calibration value as true. So what should I do?
We both are (@satya and me @DnynShinde) working on the same project but, your help didn’t work. We tried every configuration or set parameters as community taught us.
@Wetmelon Ok. I set everything as you said. But I can’t figure out I need to calibrate my motor everything which was not observed earlier. I set odrv0.axis0.motor.config.pre_calibrated =True. but still, an error isn’t solved yet. Is there any idea?
Which encoder are you using?
actually, its a base encoder along with BLDC having 84 CPR .