Good day! I have trouble calibrating my motor. Motor type - hoverboard, encoder - sincos. When using a standard hoverboard motor with an Hall encoder, the calibration is straightforward. When using the same motor, but with the sincos encoder, rotation occurs only in one direction, the calibration ends with the error ERROR_CPR_POLEPAIRS_MISMATCH. This engine works without problems with a driver from another manufacturer. Board - ODrive v3.6 24V, firmware 0.5.1. Sincos pins - gpio 3,4. Hall cpr - 90, sincos cpr - 6283. I can publish calibration script if need.
Searching for Odrive...
Odrive found
Voltage = 22.81157112121582 V
Reset current board settings? [Y/n]: y
Connection lost due to device erasing and restart...
Connection lost due to device restart...
Searching for Odrive...
Odrive found
Calibrate the engine? [Y/n]: y
Connection lost due to device restart...
Searching for Odrive...
Odrive found
Make sure the motor spins freely and press Enter...
Waiting for engine calibration to complete...
Waiting for encoder calibration to complete...
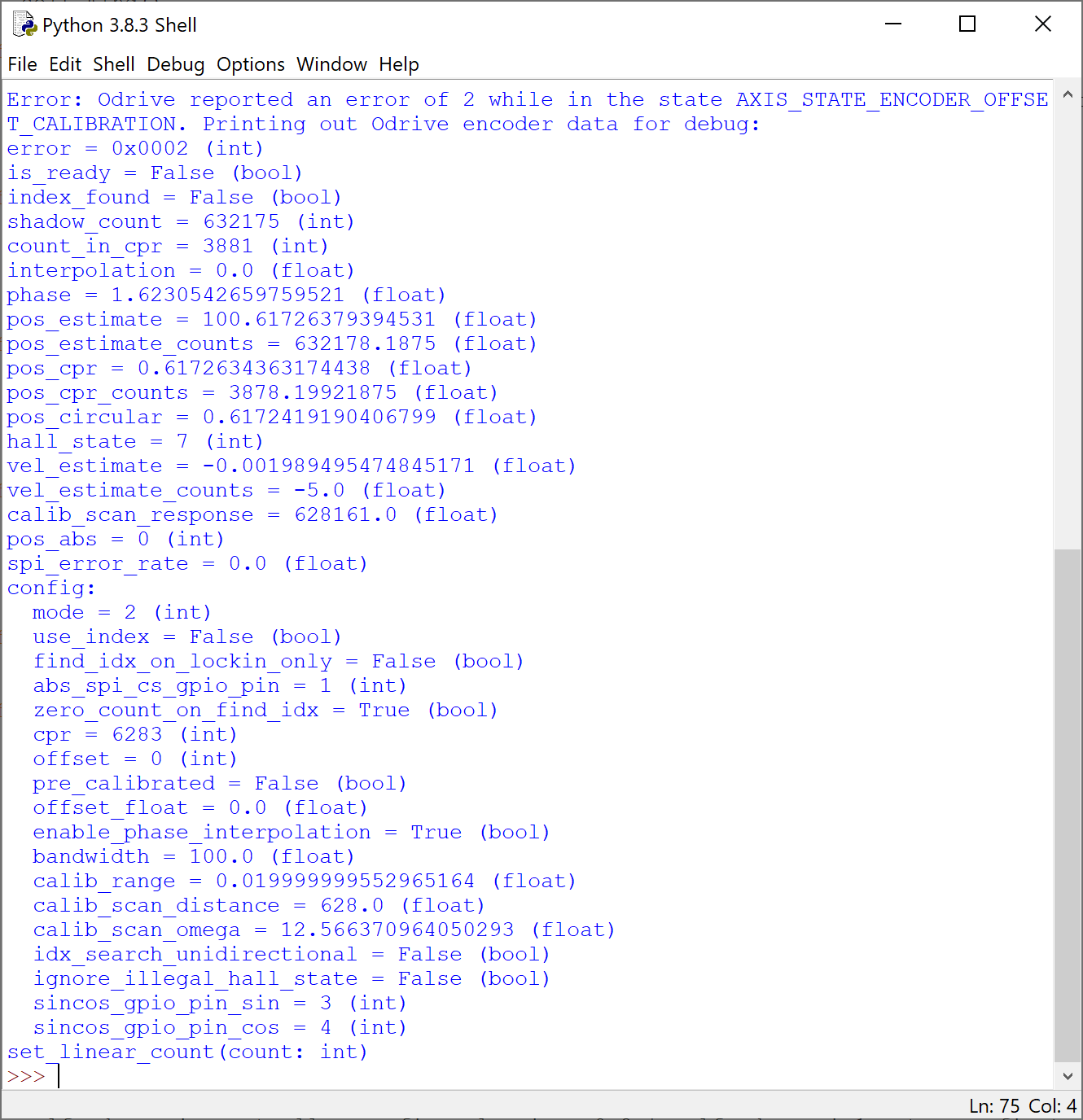
Error: Odrive reported an error of 2 while in the state
AXIS_STATE_ENCODER_OFFSET_CALIBRATION. Printing out Odrive encoder data for debug:
error = 0x0002 (int)
is_ready = False (bool)
index_found = False (bool)
shadow_count = 3835 (int)
count_in_cpr = 3829 (int)
interpolation = 0.0 (float)
phase = 0.9330251216888428 (float)
pos_estimate = 0.6100223064422607 (float)
pos_estimate_counts = 3832.859375 (float)
pos_cpr = 0.6100136041641235 (float)
pos_cpr_counts = 3832.724365234375 (float)
pos_circular = 0.6100334525108337 (float)
hall_state = 7 (int)
vel_estimate = -0.004177940543740988 (float)
vel_estimate_counts = -26.25 (float)
calib_scan_response = 208.0 (float)
pos_abs = 0 (int)
spi_error_rate = 0.0 (float)
config:
mode = 2 (int)
use_index = False (bool)
find_idx_on_lockin_only = False (bool)
abs_spi_cs_gpio_pin = 1 (int)
zero_count_on_find_idx = True (bool)
cpr = 6283 (int)
offset = 0 (int)
pre_calibrated = False (bool)
offset_float = 0.0 (float)
enable_phase_interpolation = True (bool)
bandwidth = 100.0 (float)
calib_range = 0.019999999552965164 (float)
calib_scan_distance = 150.0 (float)
calib_scan_omega = 12.566370964050293 (float)
idx_search_unidirectional = False (bool)
ignore_illegal_hall_state = False (bool)
sincos_gpio_pin_sin = 3 (int)
sincos_gpio_pin_cos = 4 (int)
set_linear_count(count: int)
I’ve no experience with sincos encoders but are you sure that the cpr is correct? 6283 does not sound like a logical amount as cpr tends to be values resulting from 2^X resulting from the resolution in bits. Though it might be different for a sincos, is it an analogue signal?
On another note, this error is also often thrown if the encoder is misaligned or not connected properly. Though it’s likely you’ve already checked that thoroughly.
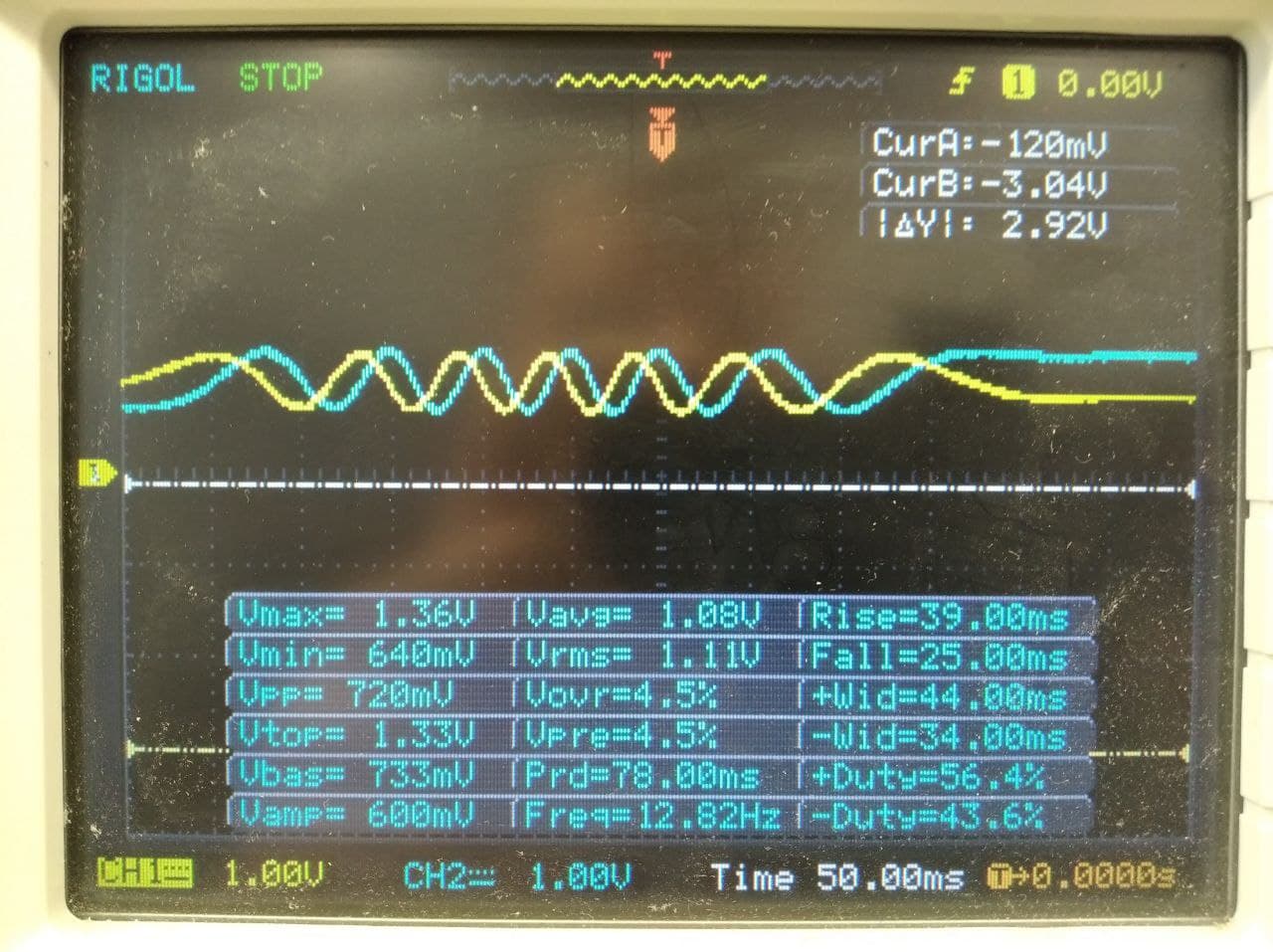
I used multiple values encoder.config.calib_scan_distance = 50; 100; 150; 62.83; 628.3; 6283, but to no avail. Is the signal incorrect? The image shows the output from the sincos encoder.
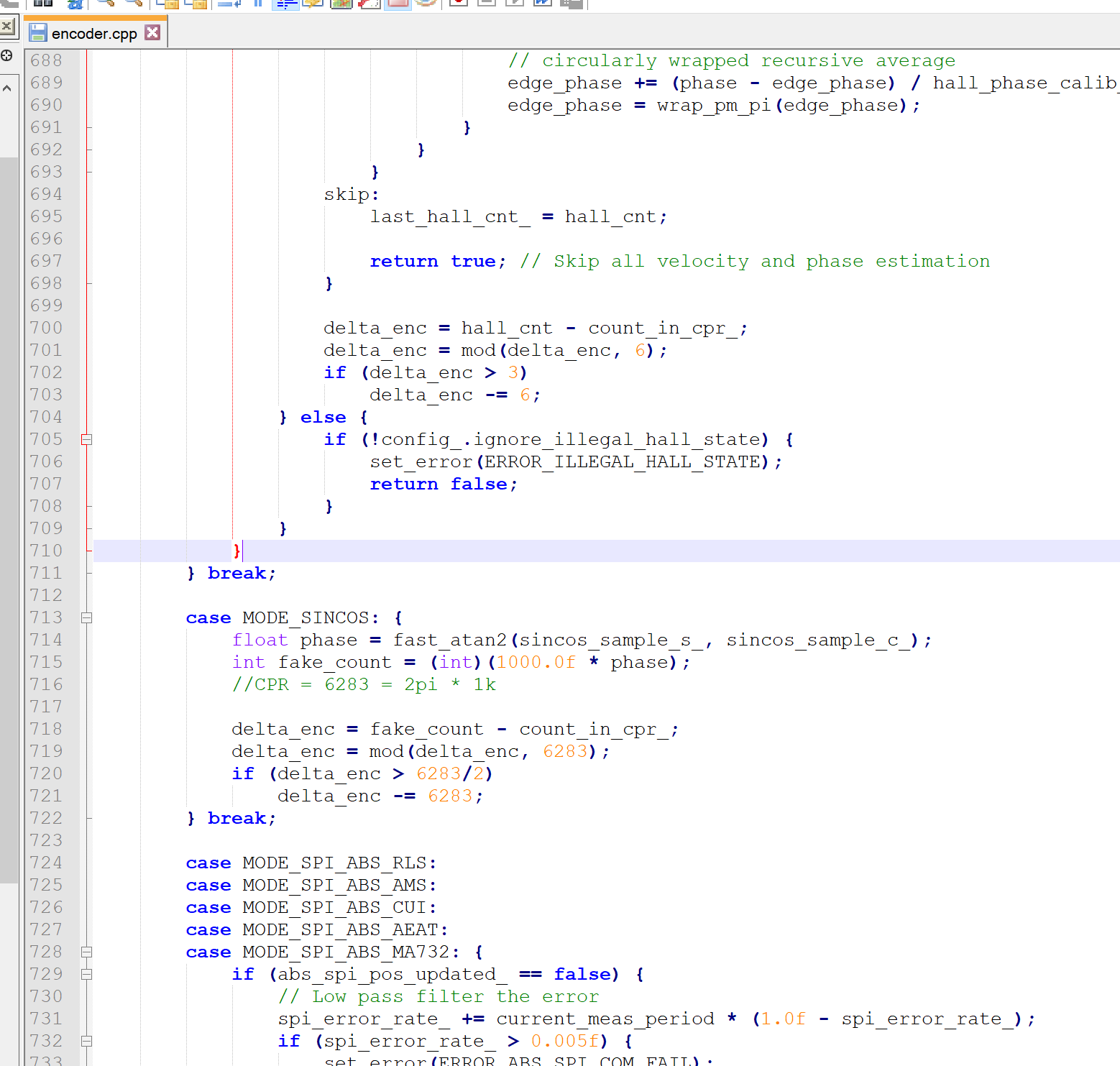
I partially modified the software in the part of the ADC sampling in order to fit the signal to the required range and not add additional hardware blocks between the ODrive and the encoder. sincos_sample_s_ and sincos_sample_c_ now convert the input signal to the range - 0.5f: + 0.5f Also increased encoder.config.calib_scan_distance to 628. But the problem remains. Motor connected to channel 1, plot for axis1.encoder.pos_estimate
Hi,I have the same situation and the same error prompt. The motor is 7 pairs of poles. How to match the cycle of this encoder? The encoder is linear Hall and the output waveform is sincos waveform;
Hey! As far as I remember, ODrive assumes one sincos period per motor revolution, but we had one sincos period per pole pair, or 15 encoder periods per full wheel revolution. Having corrected the source codes, the wheel was launched. But later I designed my own driver based on MC SDK and modbus.