I am wondering about their compatability. I’ve checked the web for wiring and this is what I got:
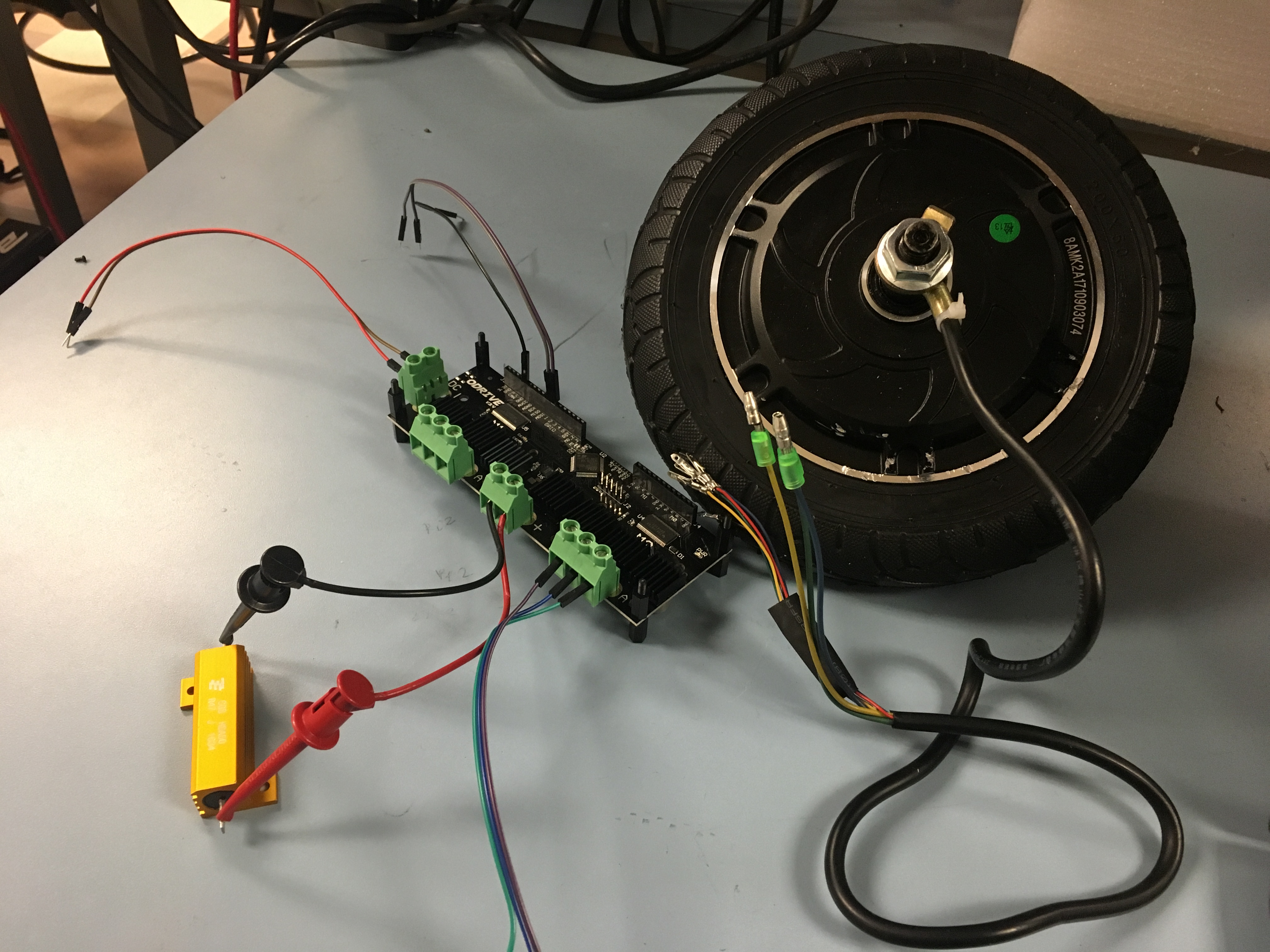
Big Wires:
Yellow -> Phase U
Green -> Phase V
Blue -> Phase W
Small Wires: Sensor Hall
Red -> 5V
Yellow -> Phase U
Green -> Phase V
Blue -> Phase W
Black -> GND
Big Wires, I understand, but for Sensor Hall, not sure if I can insert them in the M1 or M0 small jacks.
Also, I want to know the other specs of the 24V Odrive, such as current and wattage!
Ok, thanks for the response! So I ordered a 600p/r Incremental Rotary Encoder for the motor, but I fear that I’ll have to implement into the motor in a rough way. I read in another post that the encoder pins can be repurposed for Hall Sensor Inputs, but how would the coding work? Controlling hoverboard style motor-in-wheel This is the post I’m talking about.