To me, the fact that not just software but also hardware were open source was one of the big selling points of ODrive. This sudden change was entirely unexpected and, to me, highly disappointing. It changes the entire feel from “we are all a community, here are some designs and software that I’m sharing with the community and also making available as products” to “we are a product company and are managing a community around our products, but only as long as that doesn’t interfere with our product revenue”.
Also, you describe that the code is open really only so that users can customize the firmware to their needs; that’s not really about having a community build and improve things together. Any code contributions from now on would seem much less about contributing to a community code base, and more about contributing to your company by strengthening your specific products.
To me, the open source firmware is a much bigger draw than the open source hardware. While having the hardware be open source would be nice, I don’t think it has an effect on most users. I’d rather that ODrive is viable as a company, with paid developers who are working on updates to the firmware and hardware.
For me it’s still open source if only the software, cpu pinout and divider/amplifier gains are published.
Next level is the schematic and than the board files.
I guess the Schematic is only relevant for max 30% of the users, the board files for less than 5%.
Also a possible solution: publish a simplified schematic without some component values
I think you nailed it. This is pretty much the change that’s happening.
I agree that it would be nice with the communal development that you describe, and that was also the initial vision 3 years ago when I first started seriously working on this project. I am very grateful for the support and encouragement that I’ve received, but the reality is that the community contributions are not enough compared to the increasing work required to keep this project going.
In fact, the number of users is approaching 1000, and while there are a couple of helpful people on the forum, it still ends up falling to me alone to provide all the support. And with all these users, we are getting an enormous list of bugs that need fixing and many excellent feature ideas that would benefit everyone if they were implemented.
I did hire an intern for 3 months a little while back, and the progress in the project went through the roof during that time. I am in the process of hiring more full time developers to help speed up the progress, and the cost of their salary is something I struggle to afford. Therefore I must make sure that this increase in development is financially sustainable. While the slight departure from the openness to the community is unfortunate, I sincerely believe this is the direction we need to go to continue making a great motor driver for robotics.
This certainly may be the case, but as the schematic and layout files won’t be published it will surely be easier for Oskar to utilize available US legal process (even if said process is merely a third party’s policy) to ensure his company is remunerated as best he can. For example, if a seller began offering “knockoff” boards on Amazon or eBay it would be a fairly trivial matter to have their listing pulled. There are other avenues as well, such as the DMCA 1998 which covers at least the board layout (in fact there was a 2016 case in international court which ruled the procedure be similar to image copyright). Further, US trademark and patent holders can file for retroactive licenses, which are protected by the Madrid Agreement which even China signed, described under section 5.25 of MPEP. I could go on, but I think that I’ve made my point clear in that by not making the files readily available, Oskar has provided his company with ample legal grounds to ensure that a “knockoff” would not be easily sold through major channels.
Anyhow… I agree with the move and think that it affects very few people. The only possible downside I see is merely not seeing those knockoff prices and being able to cheaply convert my ceiling fan over to use ODrive. =(
translate.google:
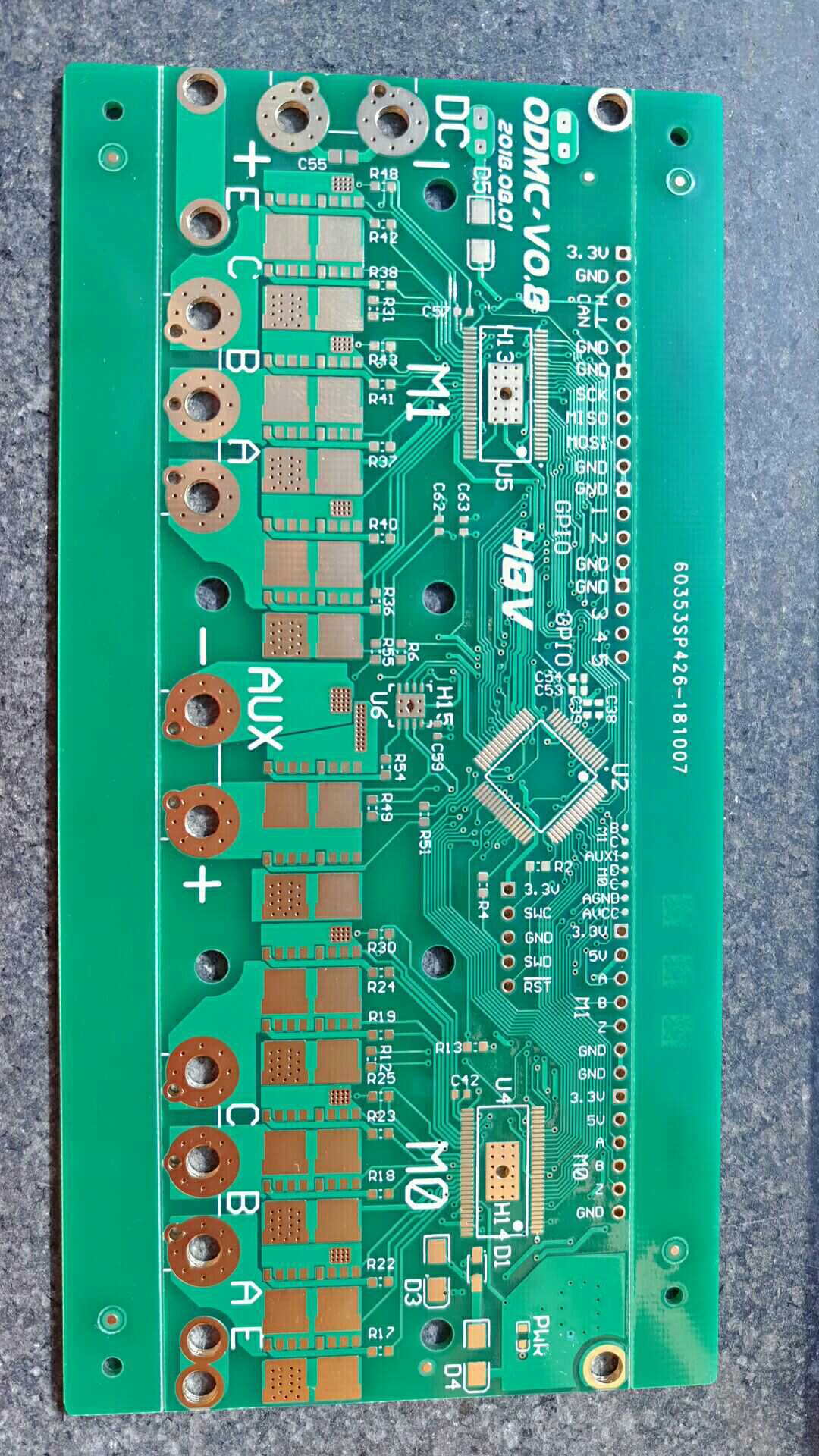
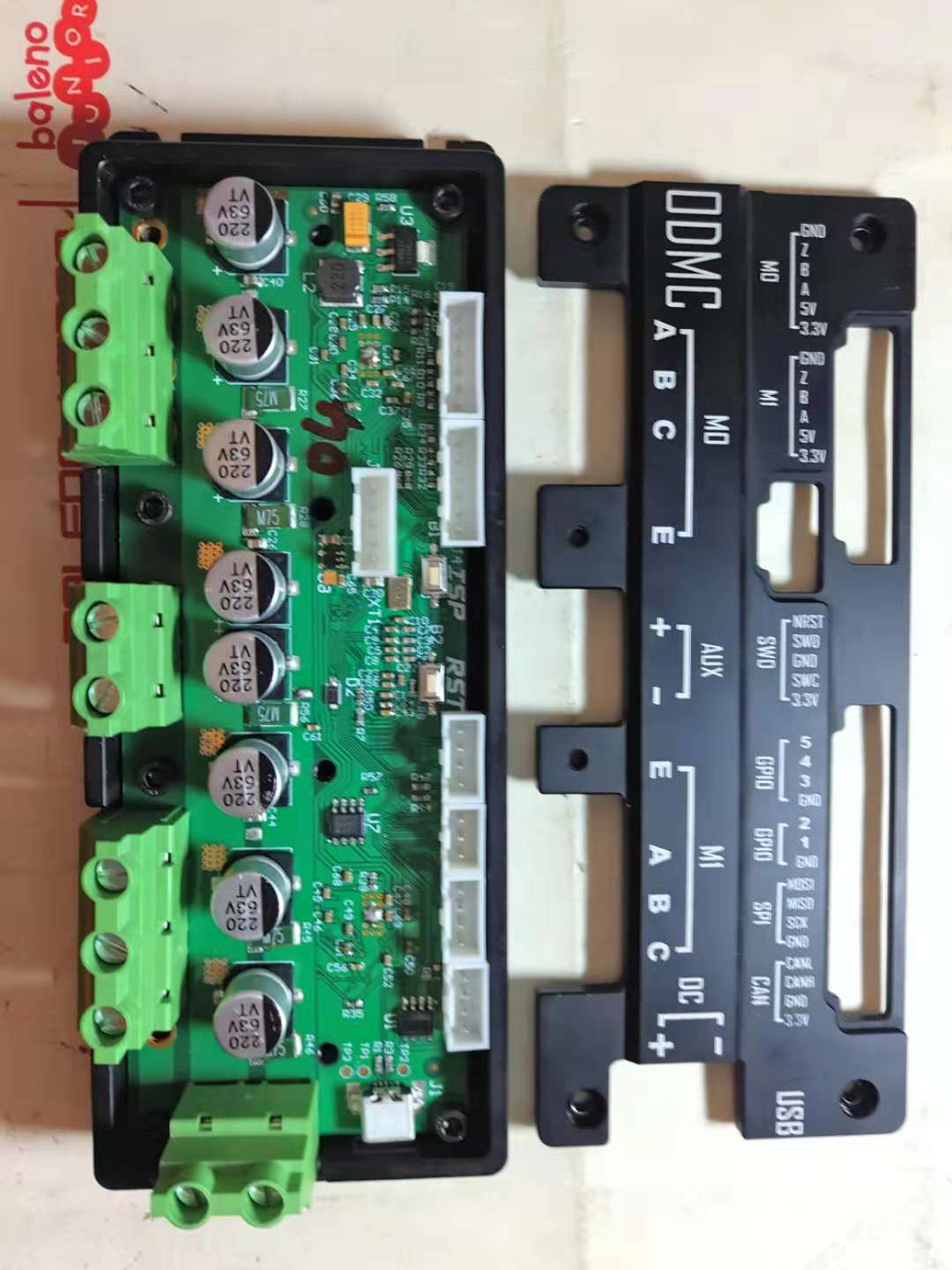
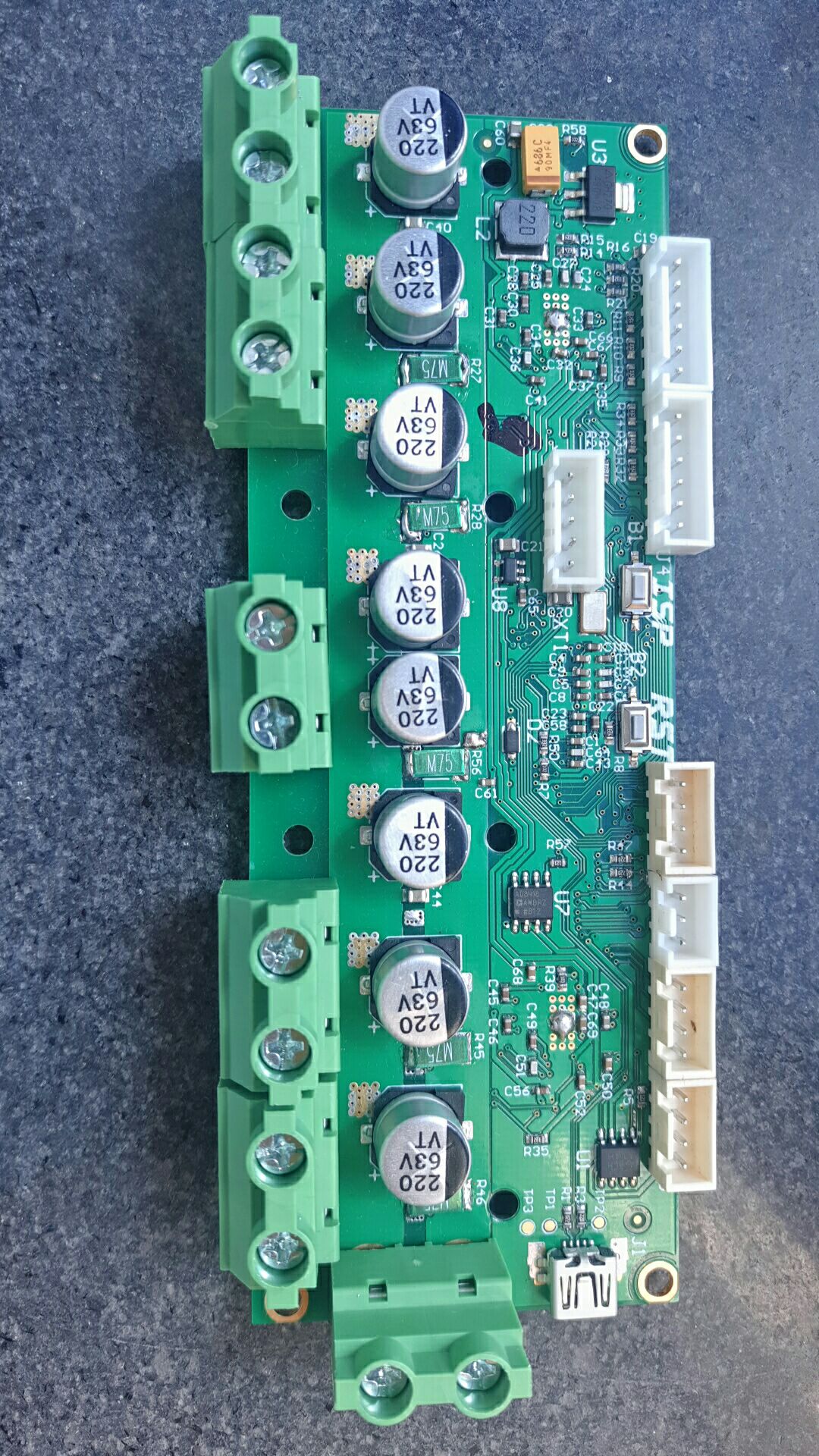
The original VESC-ODrive dual motor drive ODMC practical improved version (board part - hardware 3.4)
Based on ODrive-v3.4 (48V) hardware version.
Details:
1, added a RESET button
2, added an ISP button
3, increased capacitance on the GVDD power circuit
4, fixed the original hardware V3.4 version of the DVDD failure problem
5, modified the Usb interface to UX60SC-MB-5ST
6, modified the external interface to use connectors to enhance the project’s practical functions
7, all connectors are installed to the BOTTOM layer, which is convenient for MOS tubes to add heat sink blocks
8, increased motor grounding pin line
9, optimized the layout and wiring of the board
10, increased the large via of the bottom pad of the DRV8301 chip to avoid excessive voltage caused by soldering
11, PCB processing technology: 1.6mm two-layer board Shen Jin 2oz copper thick white silk screen
12, the power resistance changed to alloy resistance 2512 R00075 0.00075R M75 1% 3W ULRG32512R00075FLFSLT
13, provide BOM_ODMC-v0.8_48V_ material version list
I think in a way having lots of ripoff products as above means a prestigious status, and may even help the project become a de facto standard in the field. True fans and people looking for high quality stuff will continue to buy the real thing.
That’s true, it will take a long time before people use the chinesium ones also because the software is not easy to do so the real thing is better for now
Hi, I just found out this project and have been investigating a little. I found out this board sold in AE, which seems to have different upgrades that the green version posted above.
It is a pity that the hardware is now closed. I was thinking in building a lower power version for gimbal projects and similar, in a much smaller format.
Any recomendation in which schematic should I begin from?
Maybe the v3.4 release?
As a user, as long as the product can satisfy the use, the sex can be good. Open source for developers can promote the continuous development and progress of related products. A tribute to ODRIVE, thanks for bringing more possibilities to servo control. I would like to see more various types of servo drive products constantly updated!
Not sure this is news anymore, but damn this is one hell of a mark up for a clone. Even more amazing is they link to this forum, one click away from the real odrive.
The front page of the website LITERALLY says
"
And you are invited!
This project is open source, both in hardware and software, and I warmly welcome anyone who wants to join.
Hi sir, your work very amazing.
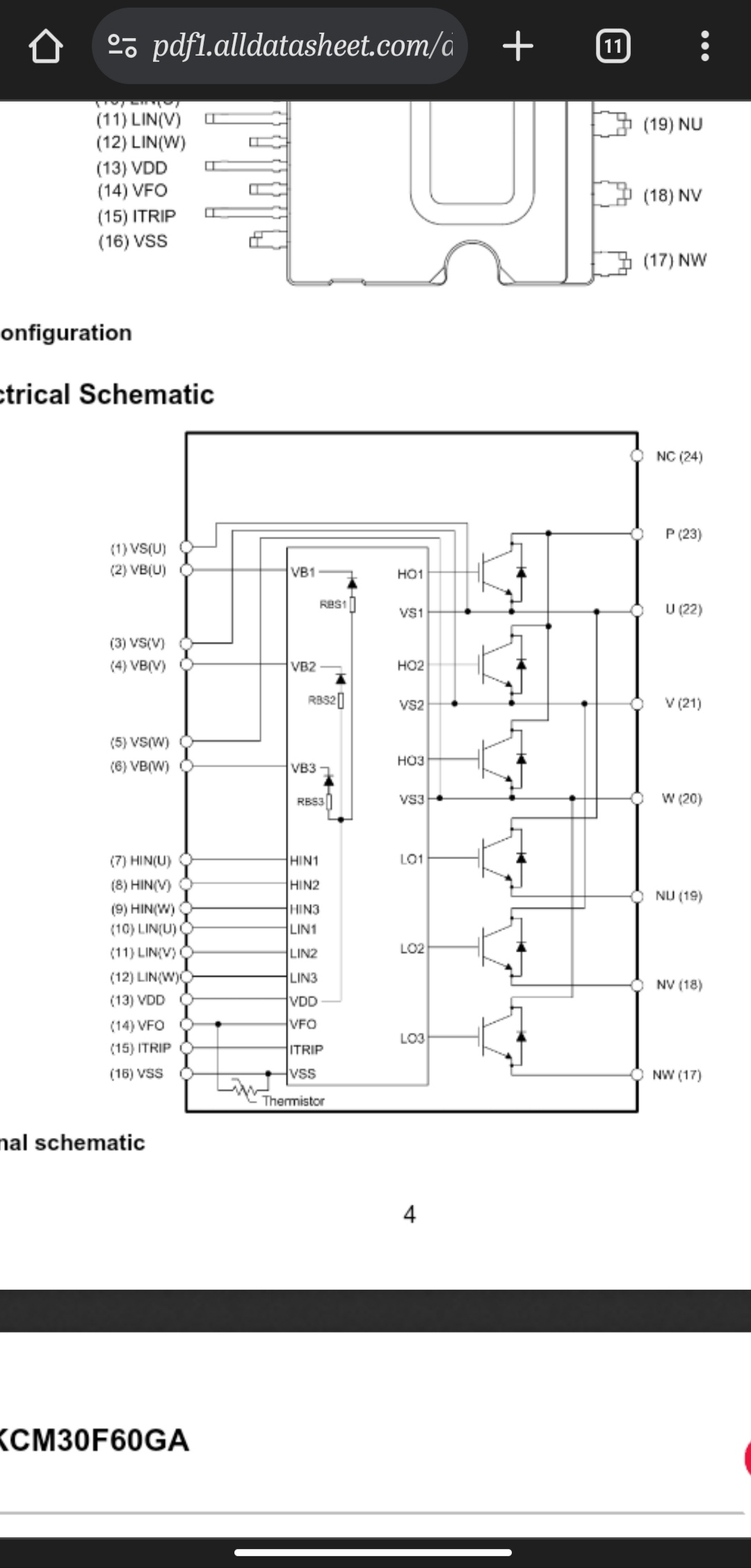
But for now i want to make odrive with 600v 30A, with this chip IKCM30F60GA. This include with the igbt driver inside, just need shunt regrister. How do u think about this?? It will work with odrive?? And the frimeware will support sir??? Before i spend more money and time. Because i need to control ac servo with step/dir