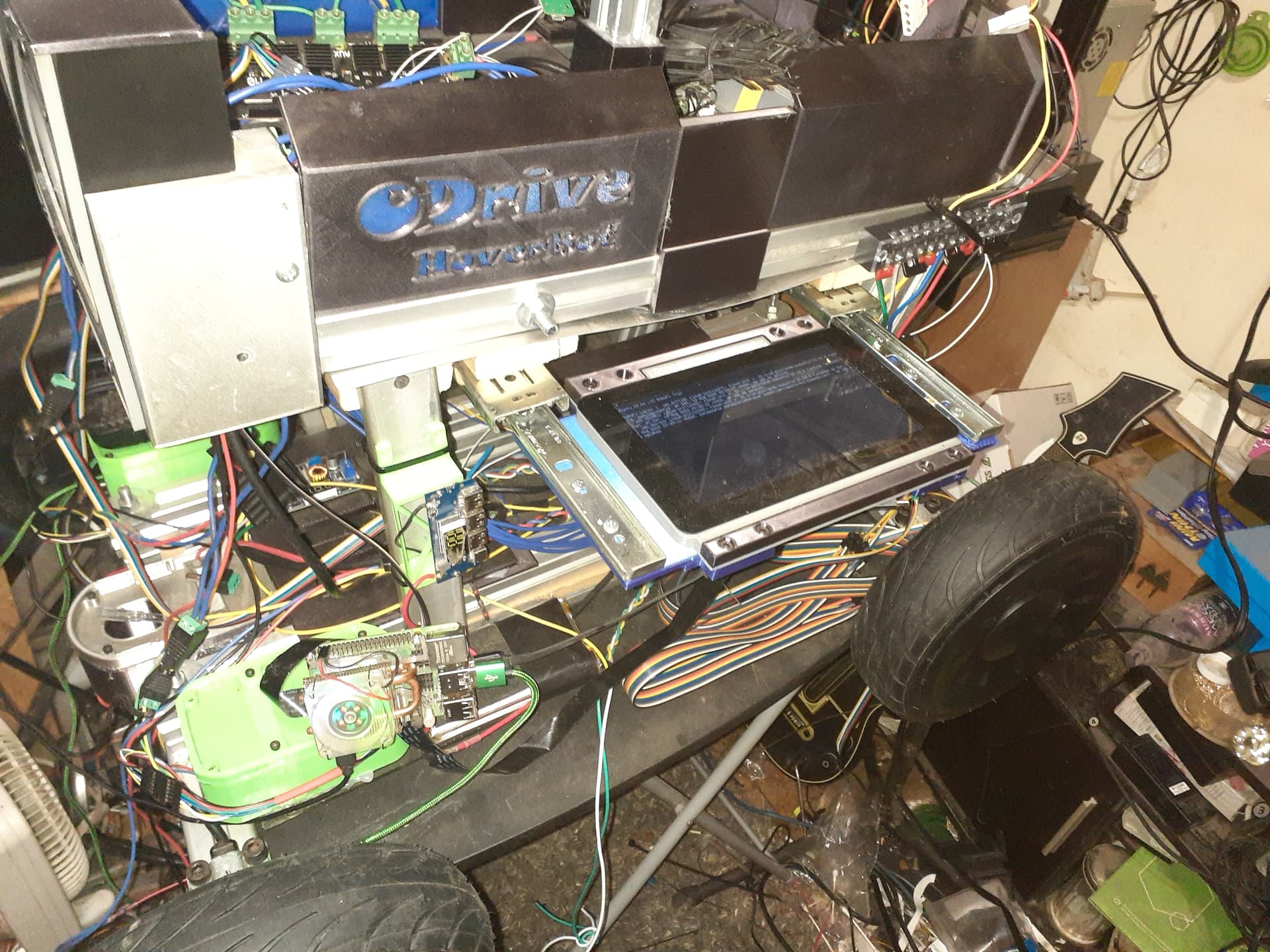
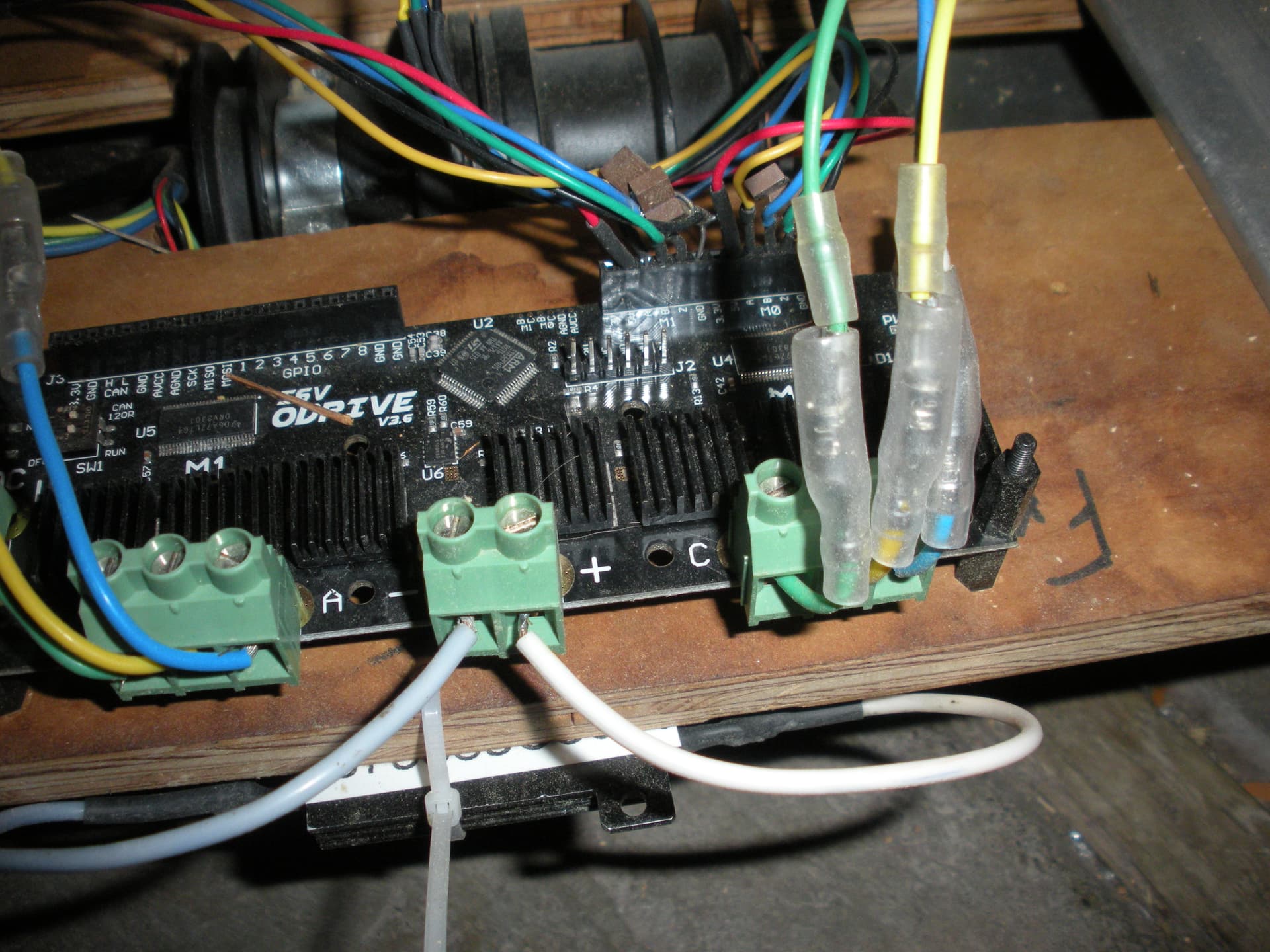
for my robot im using the air filled 10" hoverboard motors and trying to find out what connection do i do when only 5 inputs?
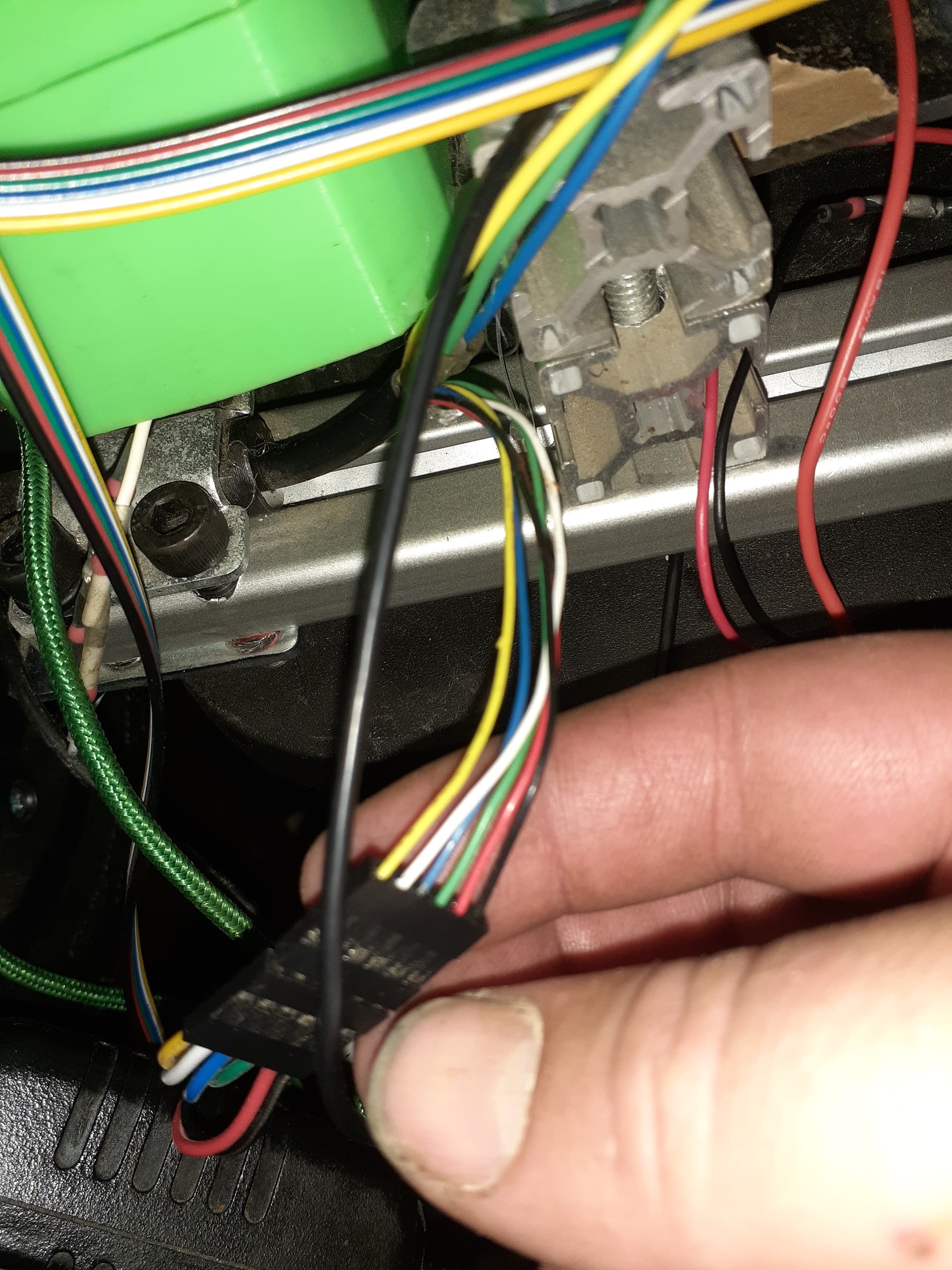
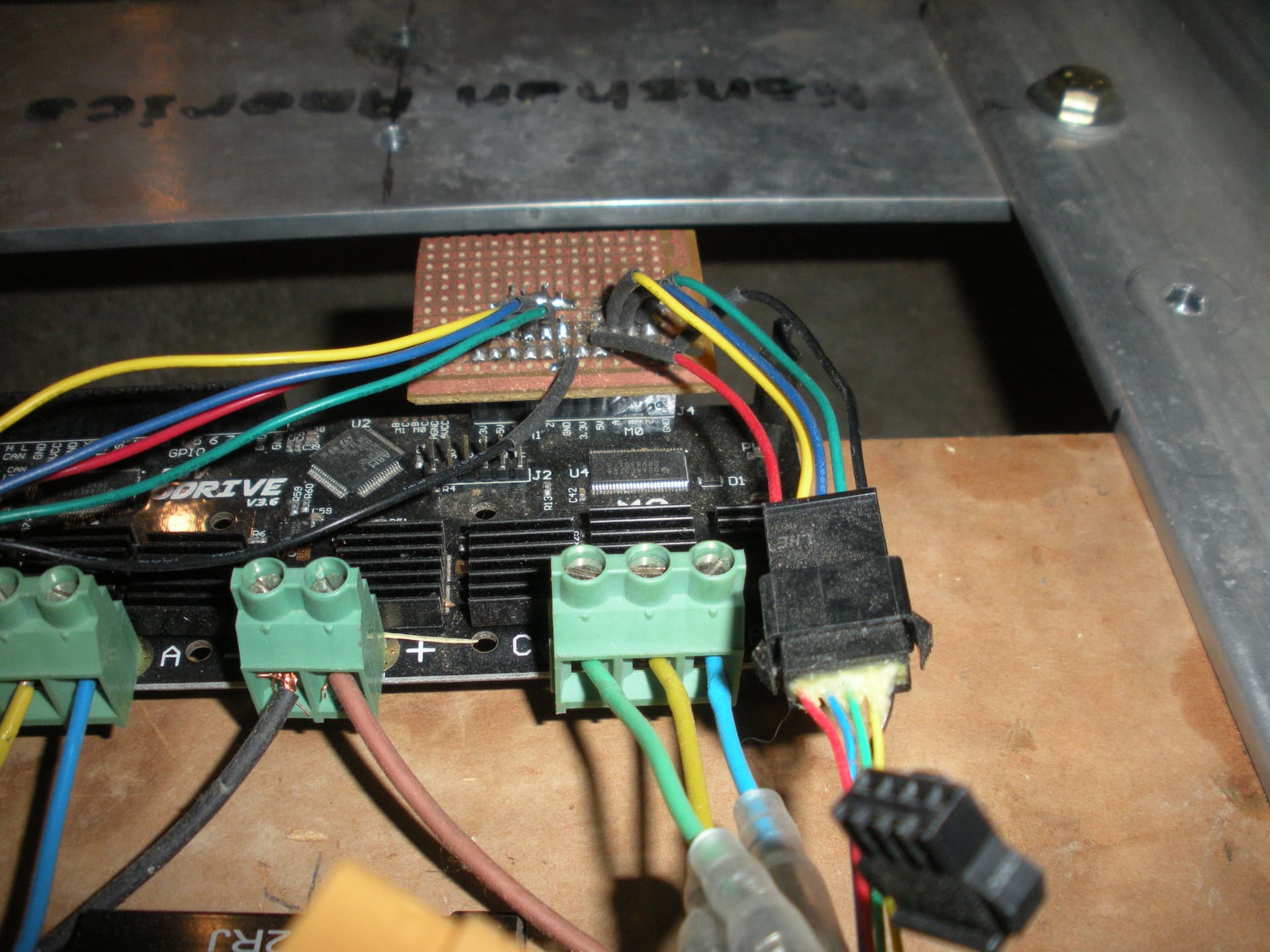
Here’s my hook up for my 10" hoverboard.
My “guess” is white might be temp sensor.
EDIT:
On mine wiring is:
Red 5v
Yellow is A
Blue is B
Green is Z
Black is Gnd
yes white is a thermistor. i finally got it working
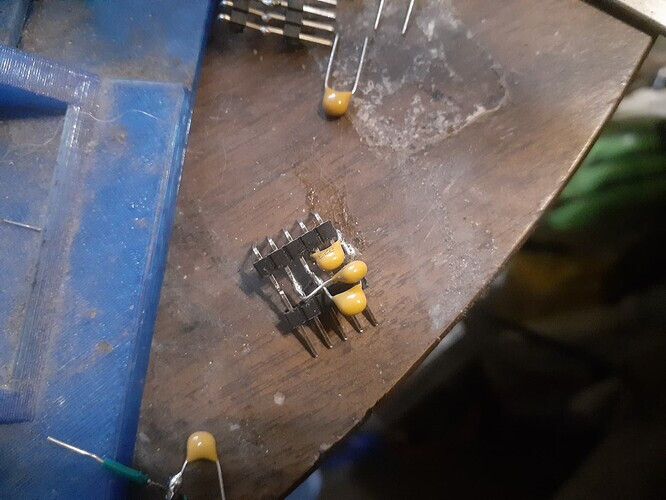
i like how you did capacitors on a board.
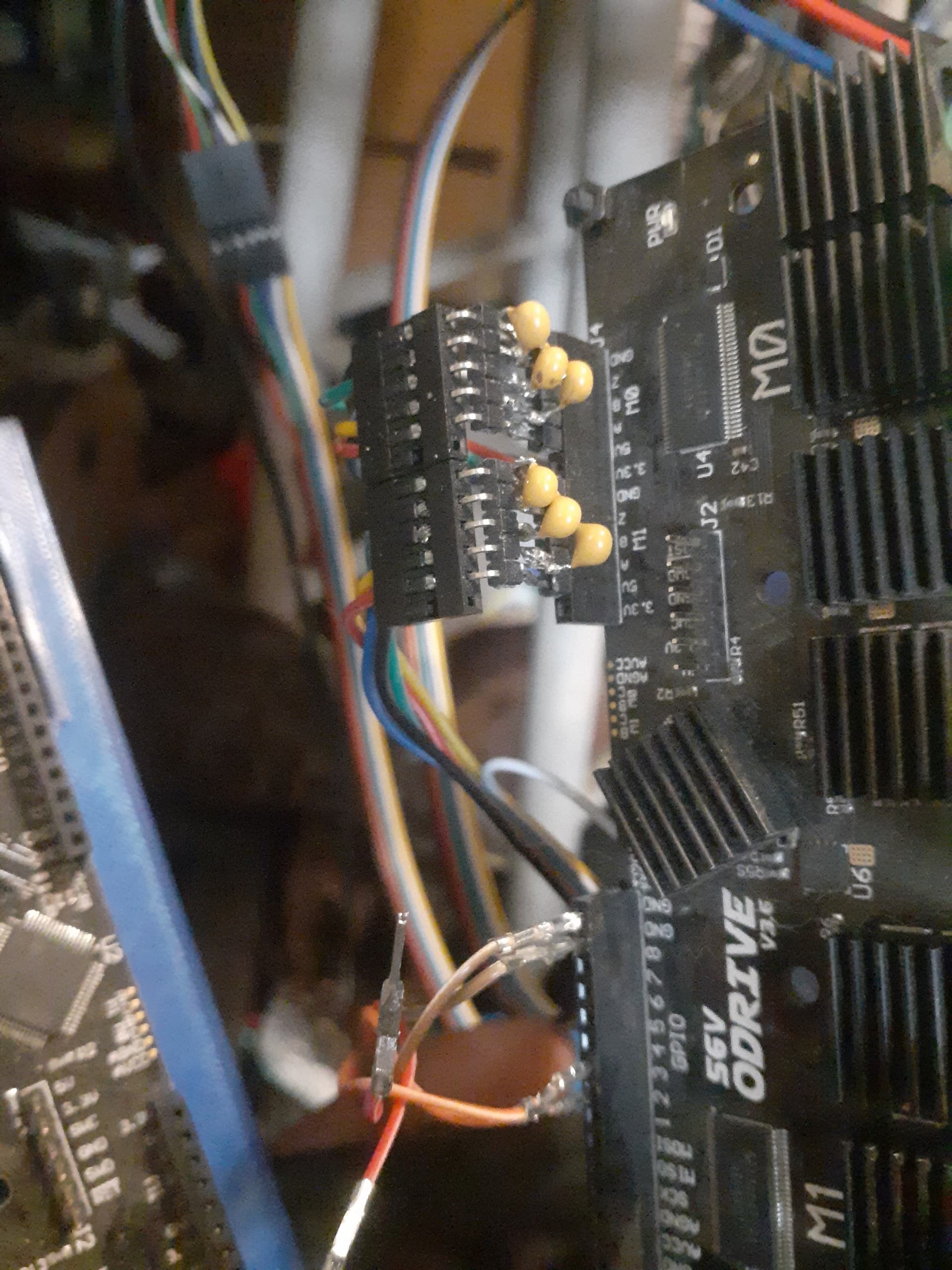
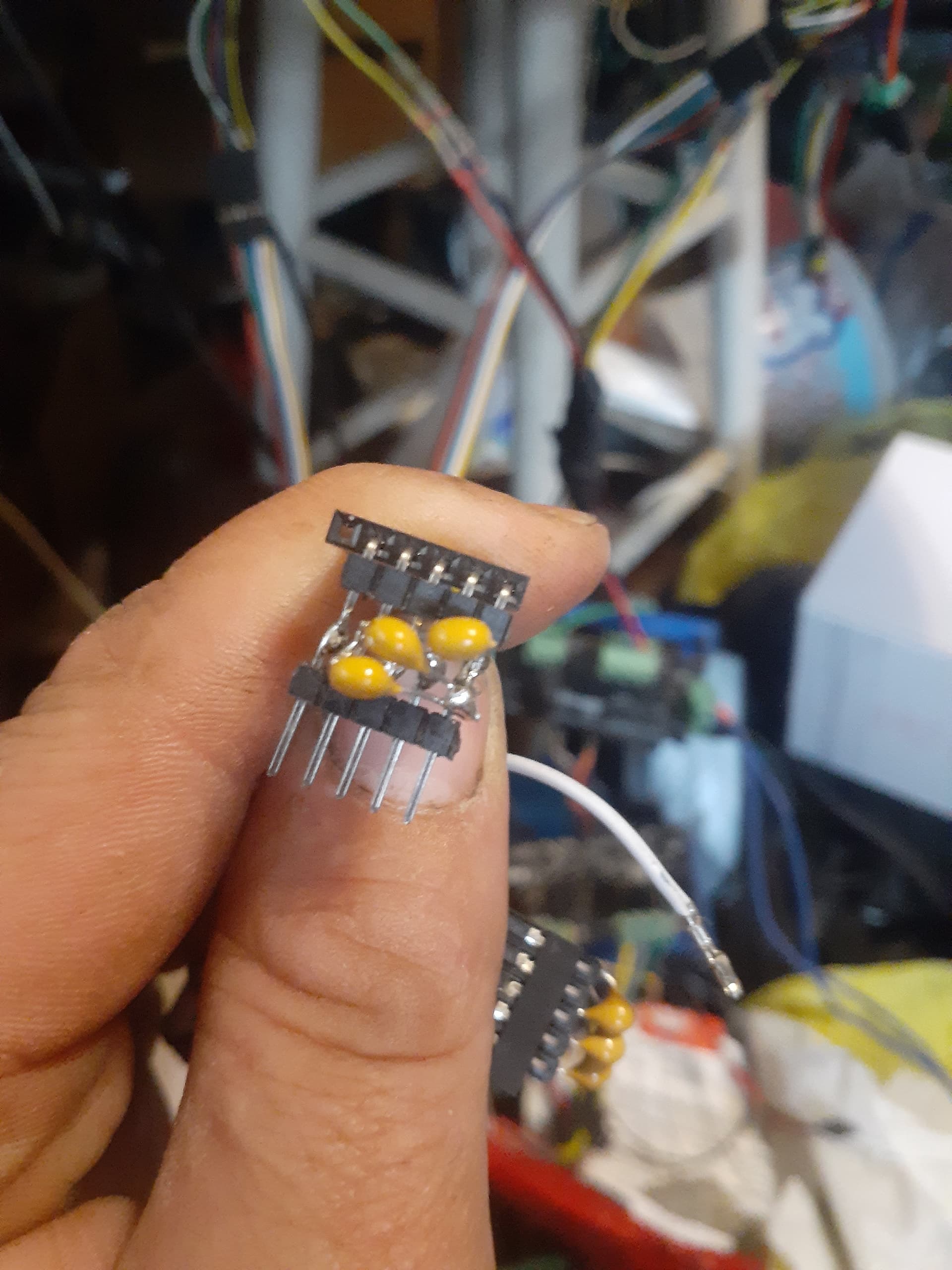
i didnt want to solder on the board there 22nf seems to work perfect just having trouble setting it up on ROS NOETIC on rpi4
Thanks
I used prototyping board cut to size. Right angle header pins like yours would probably make installing easier to the Odrive, but I made do. The header pins tension
definitely keep the connections from glitching.