I want to use the recommended absolute encoder AMT232B.
I have a few questions .
How can I connect two AMT232B encoders to the oDrive board ?
Where can I find the appropriate firmware ?
Is the support of these encoders included in the RazorsFrozenTest branch which I need to use (I use CAN bus) ?
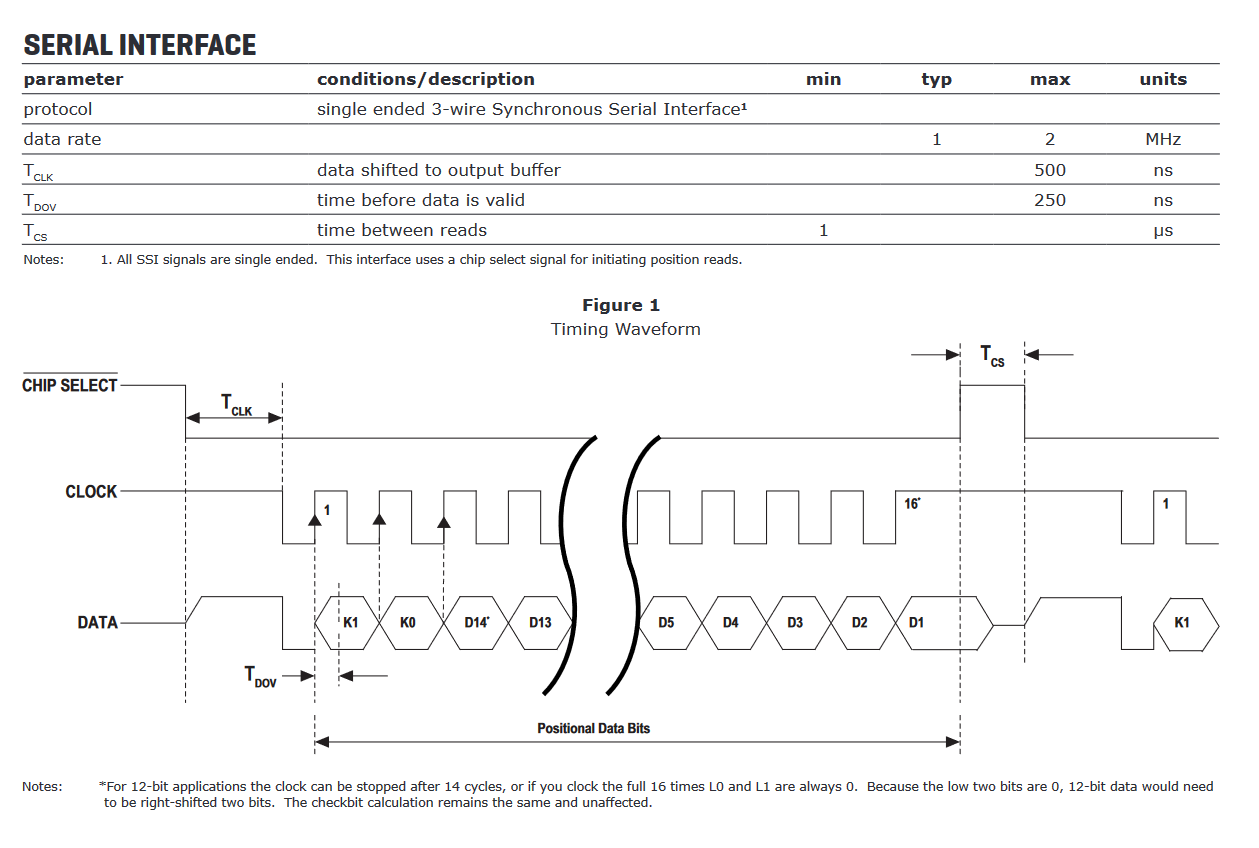
I think this interface can be used by our SPI bus, it looks very similar to the settings of the AMS encoders such as the AS5048, but it’s not currently supported (there’s a few differences).
ok, thanks.
It’s disapointing : this encoder is RECOMMENDED but NOT SUPPORTED !!!
I will receive 4 of these encoders next week. I will test them and see …
Oh I see. That document is not recommended encoders, although I understand how you may have come to that conclusion. Most of those encoders have never been tested, programmed, or verified to work with ODrive.
The only encoder model that we recommend is the CUI AMT102. It can be purchased on the ODrive Robotics website or from a number of other retailers (ours comes with a nice cable though ) https://odriverobotics.com/shop/cui-amt-102
 )
)