odrv0.config.brake_resistance = 2.0
odrv0.config.dc_bus_undervoltage_trip_level = 8.0
odrv0.config.dc_bus_overvoltage_trip_level = 56.0
odrv0.config.dc_max_positive_current = 30.0
odrv0.config.dc_max_negative_current = -5.0
odrv0.config.max_regen_current = 0
odrv0.save_configuration()
odrv0.axis0.motor.config.pole_pairs = 14
odrv0.axis0.motor.config.calibration_current = 10
odrv0.axis0.motor.config.resistance_calib_max_voltage = 5
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.motor.config.current_lim = 20
odrv0.axis0.motor.config.requested_current_range = 30
odrv0.save_configuration()
编码器参数配置
odrv0.axis0.encoder.config.mode = ENCODER_MODE_INCREMENTAL
odrv0.axis0.encoder.config.cpr = 16384
odrv0.axis0.encoder.config.bandwidth = 3000
odrv0.axis0.config.calibration_lockin.current = 5
odrv0.axis0.config.calibration_lockin.ramp_time = 0.4
odrv0.axis0.config.calibration_lockin.ramp_distance = 3.1415927410125732
odrv0.axis0.config.calibration_lockin.accel = 20
odrv0.axis0.config.calibration_lockin.vel = 40
odrv0.save_configuration()
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROL
odrv0.axis0.controller.config.vel_limit = 50
odrv0.axis0.controller.config.vel_gain = 0.01
odrv0.axis0.controller.config.vel_integrator_gain = 0.005
odrv0.axis0.controller.config.input_mode =INPUT_MODE_PASSTHROUGH
odrv0.axis0.controller.config.vel_ramp_rate = 4
odrv0.save_configuration()
odrv0.reboot()
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
odrv0.axis0.motor.config.pre_calibrated = True
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
odrv0.axis0.config.startup_encoder_offset_calibration = True
odrv0.axis0.config.startup_encoder_offset_calibration = True
odrv0.axis0.config.startup_closed_loop_control = True
odrv0.save_configuration()
odrv0.reboot()
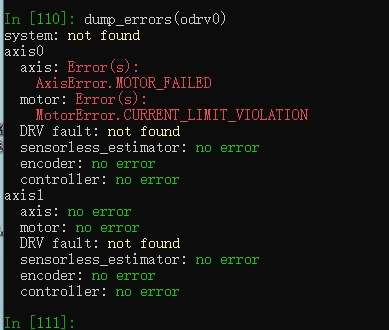
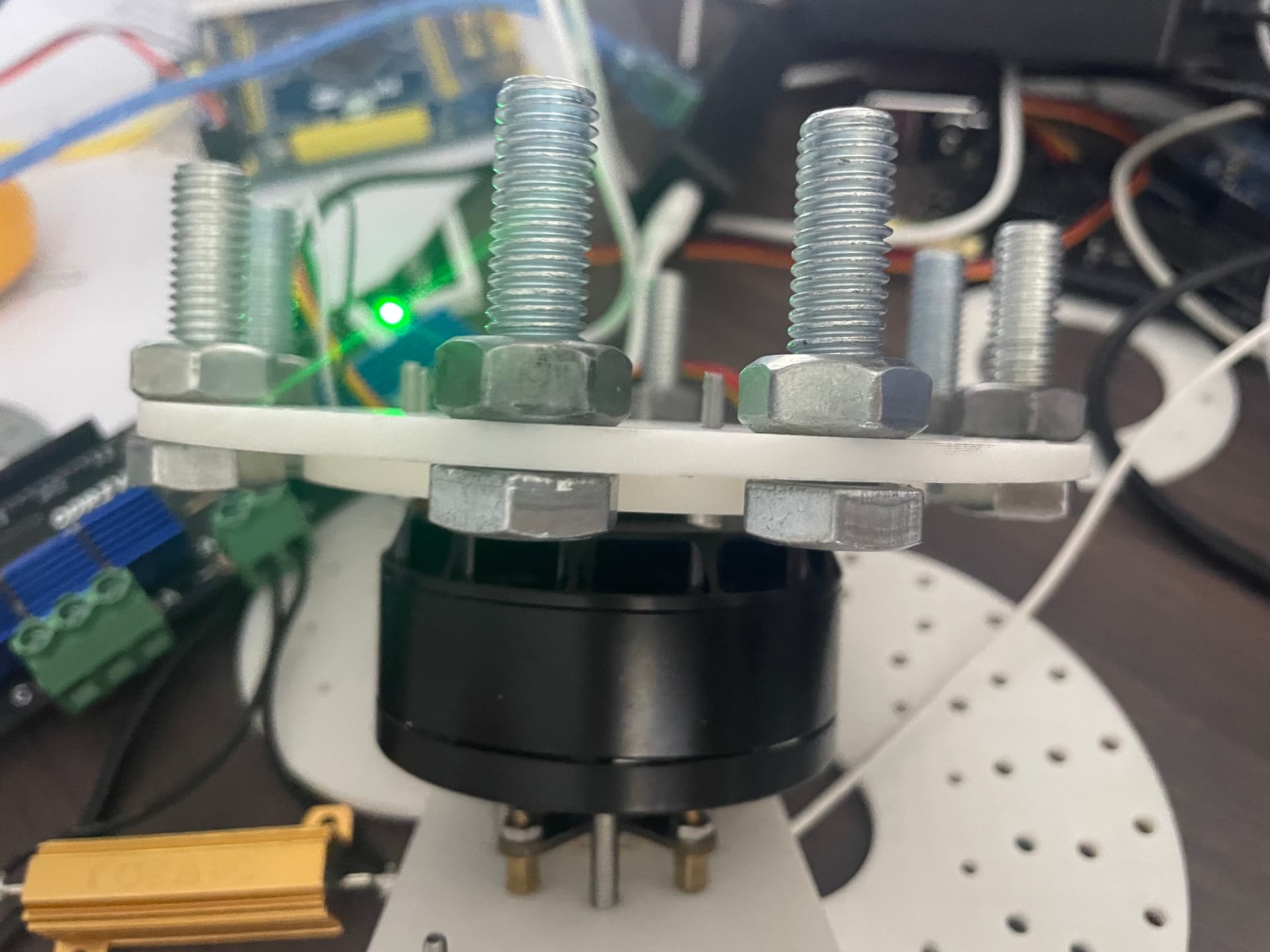
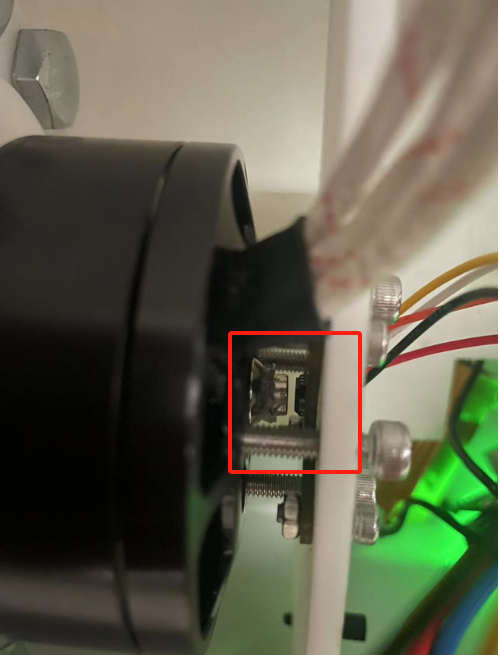
The above are my configuration parameters,There is a load on the motor, which is a round iron piece of about 0.6 kg. The following error occurred during operation. How should I solve this error? Trouble master answers。I use a magnetic incremental encoder and the motor is EA60 kv330 model。