Hi everyone,
I’m facing an issue with position and speed measurements using an ODrive Pro and an MA732 encoder (SPI communication), and I’m struggling to identify the root cause.
Setup
- Controller: ODrive Pro
- Encoder: MA732 (SPI)
- I also tested reading the encoder with a Raspberry Pi, and I observe the same behavior
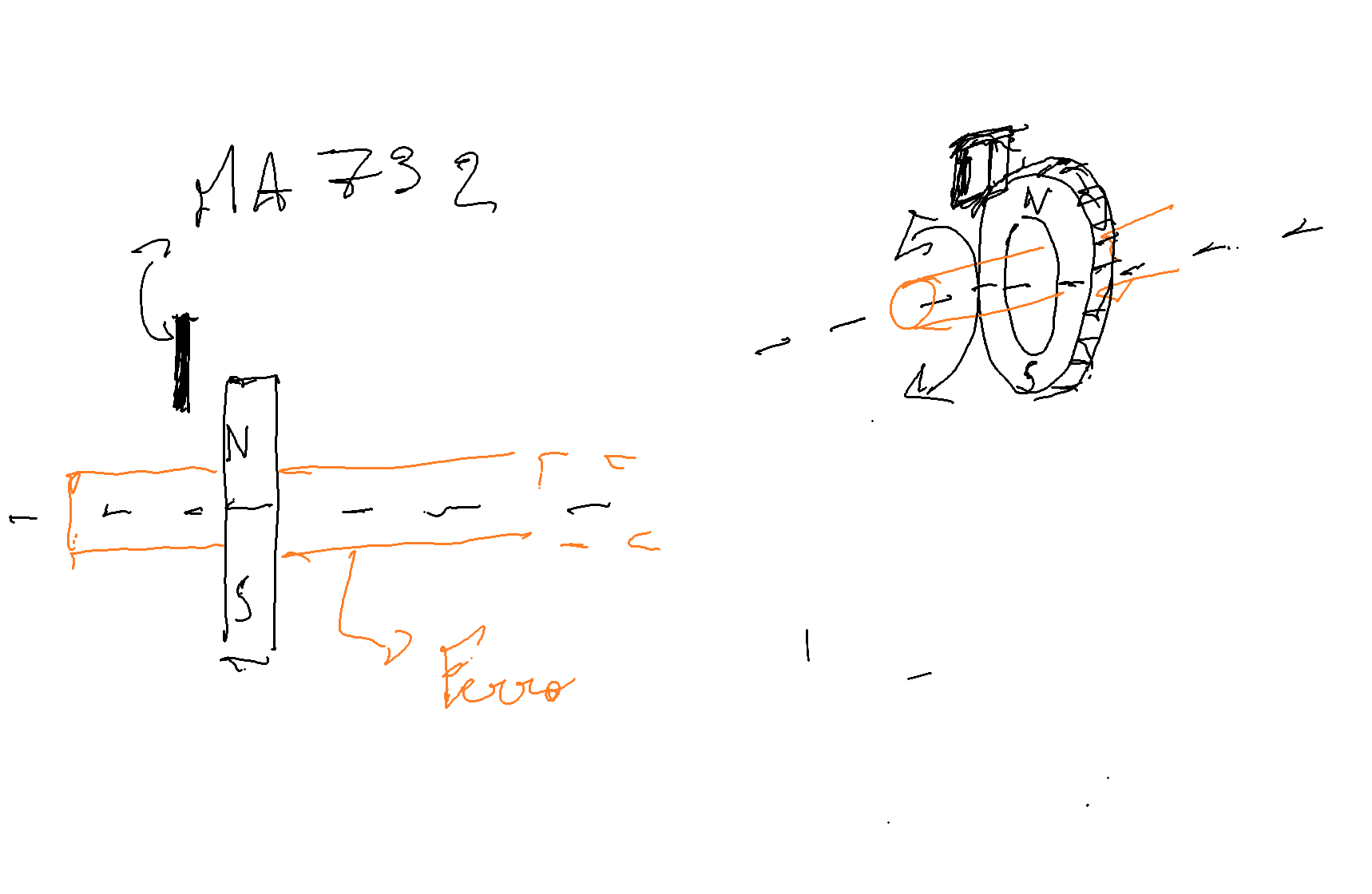
Mechanical configuration
- The motor has an external rotor with a static shaft, so I cannot mount the encoder on-axis
- I designed a 3D-printed part fixed to the rotor, on which I mounted a ring magnet
- The encoder is placed off-axis
More precisely, the geometry is the following:
- The distance between the motor axis and the sensing center of the encoder is equal to the external radius of the ring magnet
- So the center of the sensor is aligned radially with the outer edge of the ring magnet
- The sensor is not facing the magnet radially
- Instead, it is oriented parallel to the motor axis and “looks” along the axis direction, towards the motor
In other words, the sensor is positioned beside the rotor, at the same radius as the outer edge of the magnet, and measures the magnetic field along a direction parallel to the shaft
(see schematic)
Observed issue
At low speed (when I rotate the motor slowly by hand):
- The measurements look correct
- I observe one acceleration followed by one deceleration
- The position evolves smoothly
At higher speed (still by hand, but faster):
- The measurements become incorrect
- I observe multiple acceleration and deceleration events, even though I only applied a single impulse
- This suggests that the position measurement is also corrupted
Additional checks
- I initially suspected an ODrive configuration issue
- However, when reading the encoder directly via SPI with a Raspberry Pi, I observe the same behavior
→ So the issue likely does not come from ODrive itself
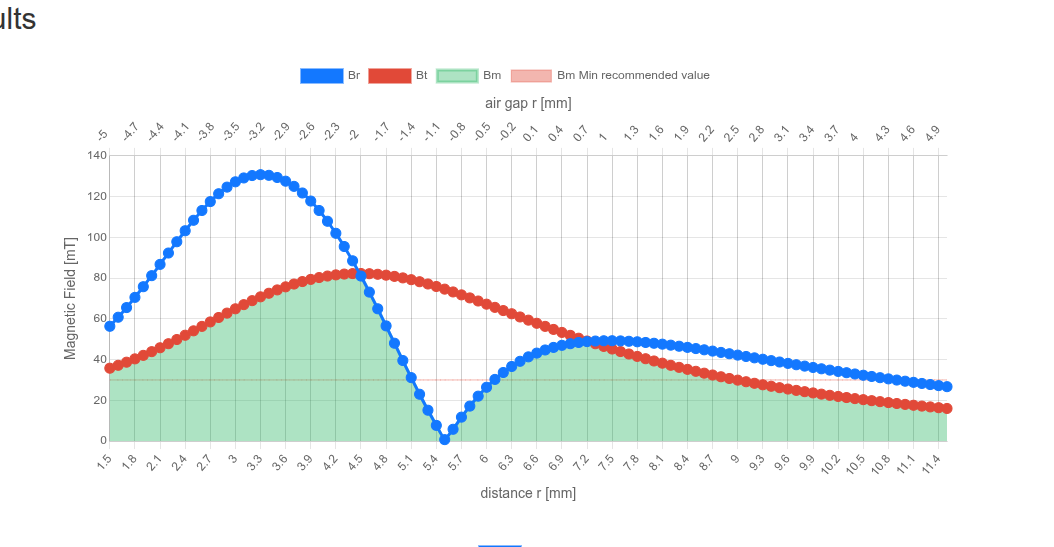
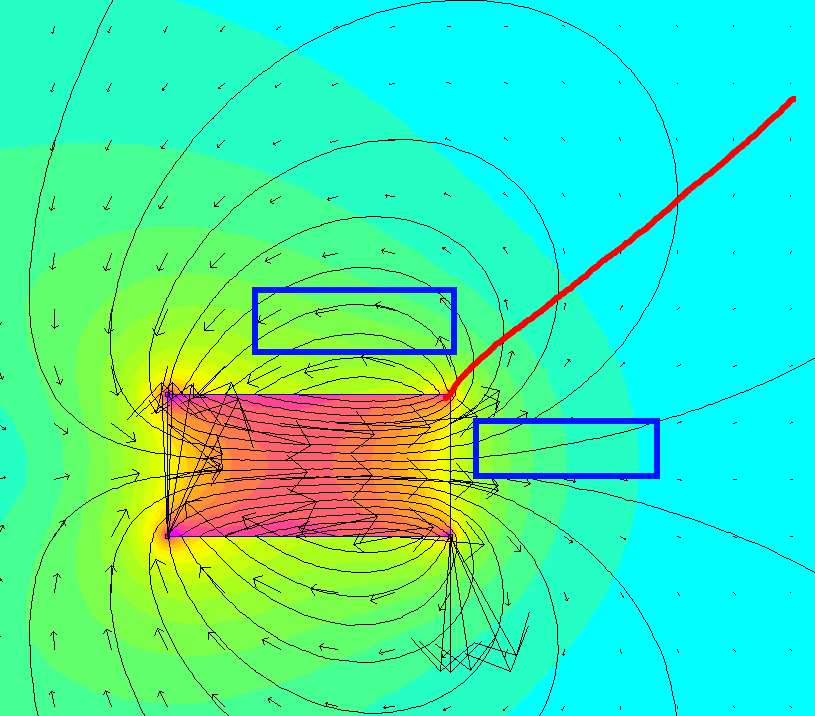
Hypothesis
I am considering possible magnetic disturbances:
- The shaft is ferromagnetic (but uniform over one revolution)
- The magnet has about 1.28 T internal flux density
- Intuitively, I would expect the magnet field to dominate
What I find surprising:
- The issue appears only at higher speed
- And results in multiple speed peaks for a single motion input
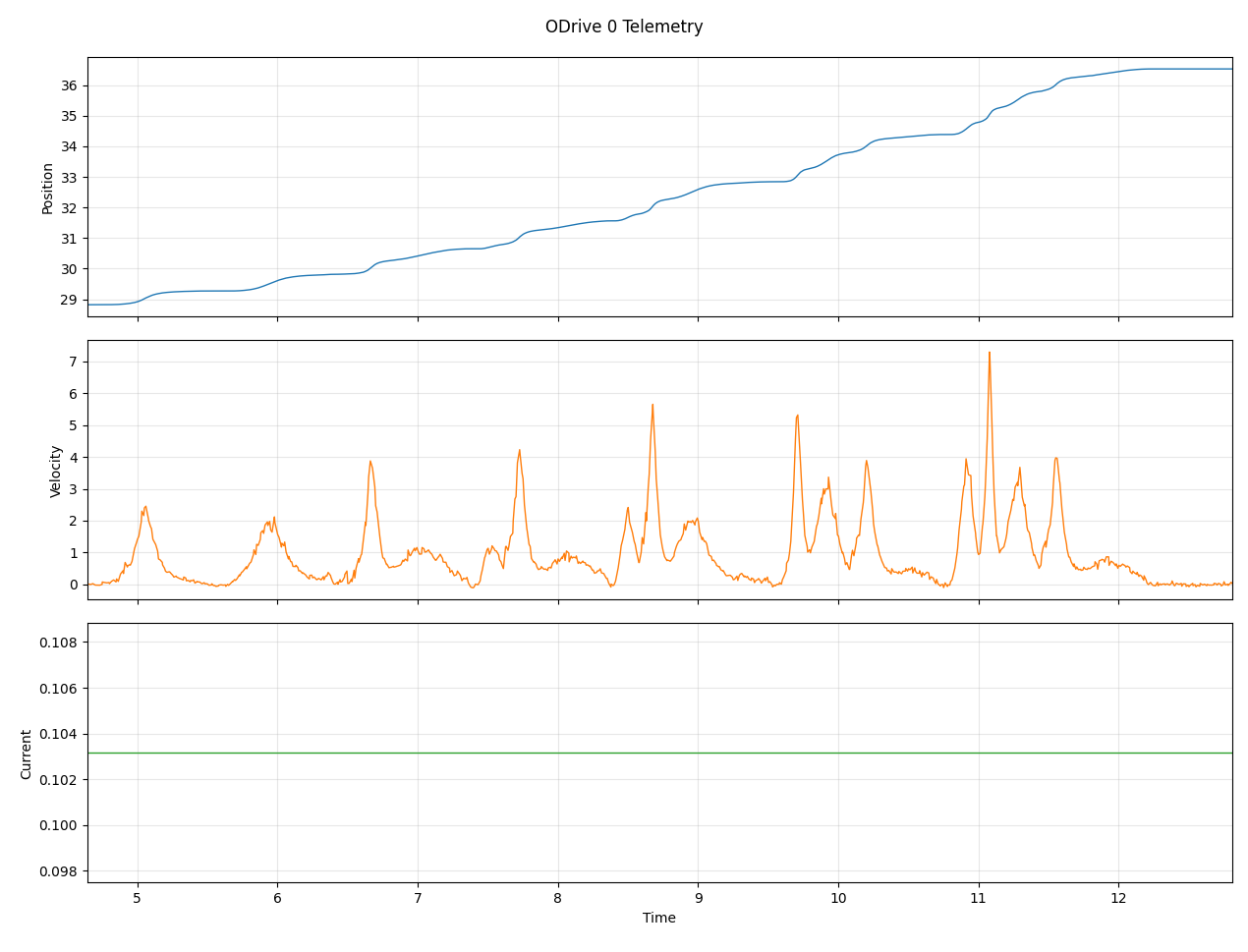
Measurement example
I recorded several manual accelerations (7 attempts with increasing force):
- The first two measurements look correct
- The following ones show multiple speed peaks, even though each corresponds to a single acceleration of the motor
Questions
- Could this be due to magnetic field distortion from the motor or shaft?
- Could this off-axis + axial measurement configuration create angle errors that worsen with speed?
- Could this be related to sampling / aliasing / SPI timing issues at higher speed?
- Has anyone seen similar behavior with the MA732 in non-standard geometries?
Any insights or similar experience would be greatly appreciated!
Thanks in advance ![]()