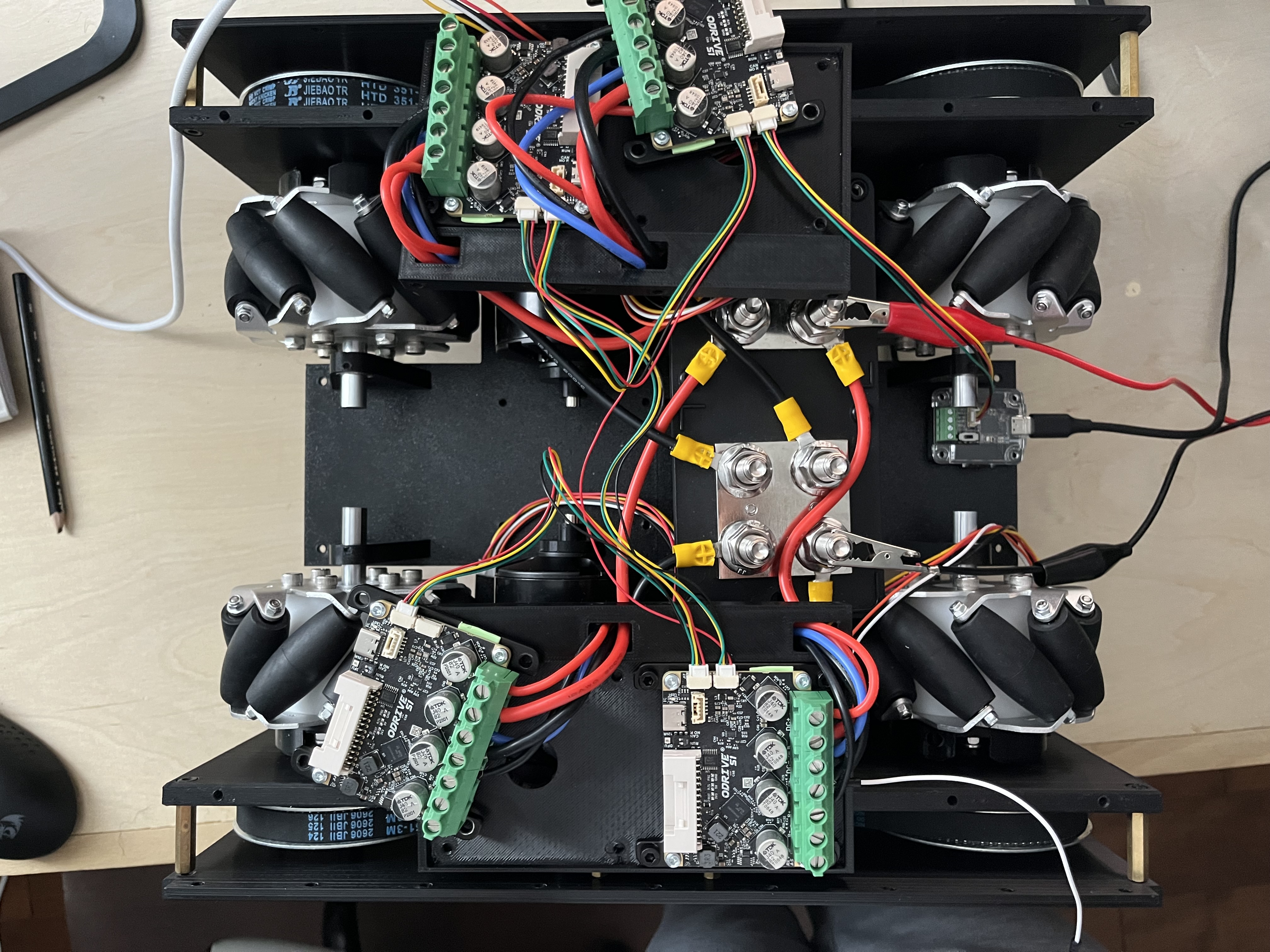
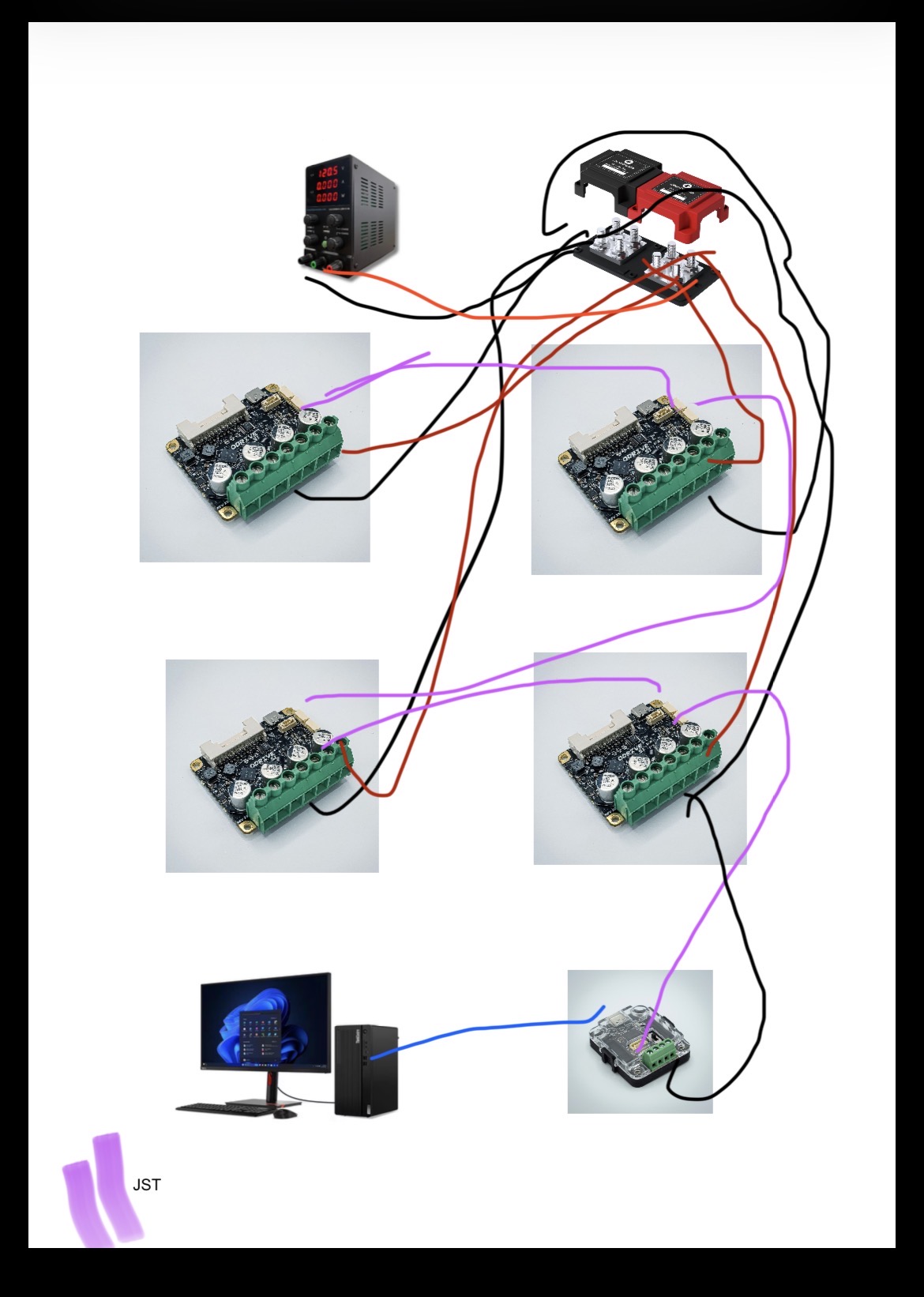
Hey everyone, new to ODrive robotics here. I’ve got 4x ODrive S1s that I configured over USB successfully, and I’m now trying to get them running over CAN using the ODrive USB-CAN adapter.
My issue: only the 2nd and 3rd ODrives in the chain ever show up in the Web GUI or on Linux and Windows.
I’ve tried:
Swapping which ODrives sit in each position. All ODrives work in position 2 and 3
Confirmed unique node IDs
Toggling the termination resistor on the last ODrive, and every combination of onboard resistor infact. Resistance is 60 ohms
Grounding the CAN bus
Confirmed proper power on all ODrives
Swapped bus wires around
It is always position 1 and 4 in the chain are the problem. Anyone seen this before? Any help appreciated!
Edit: did some more reading and it appears some related software is new. Is this the issue?
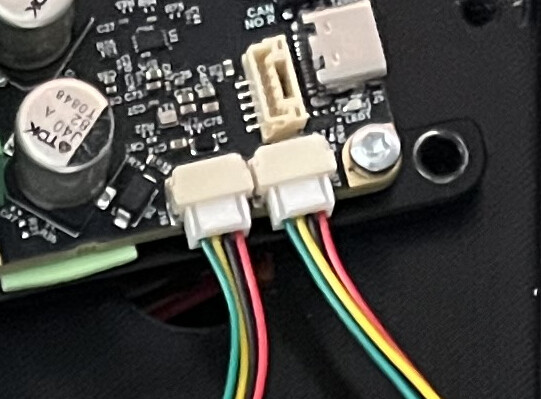
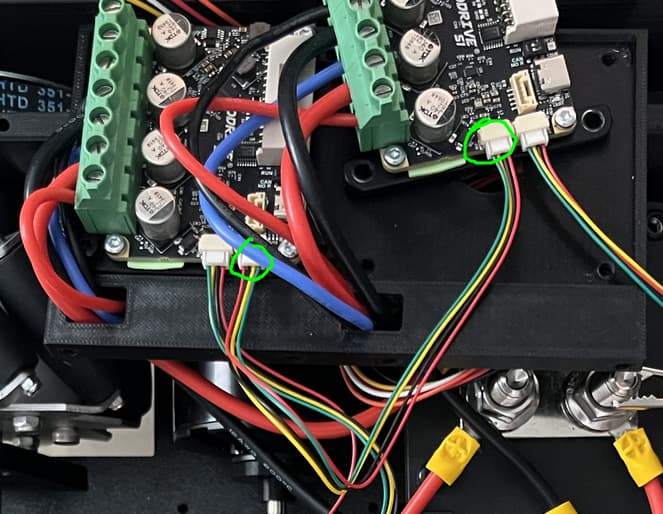
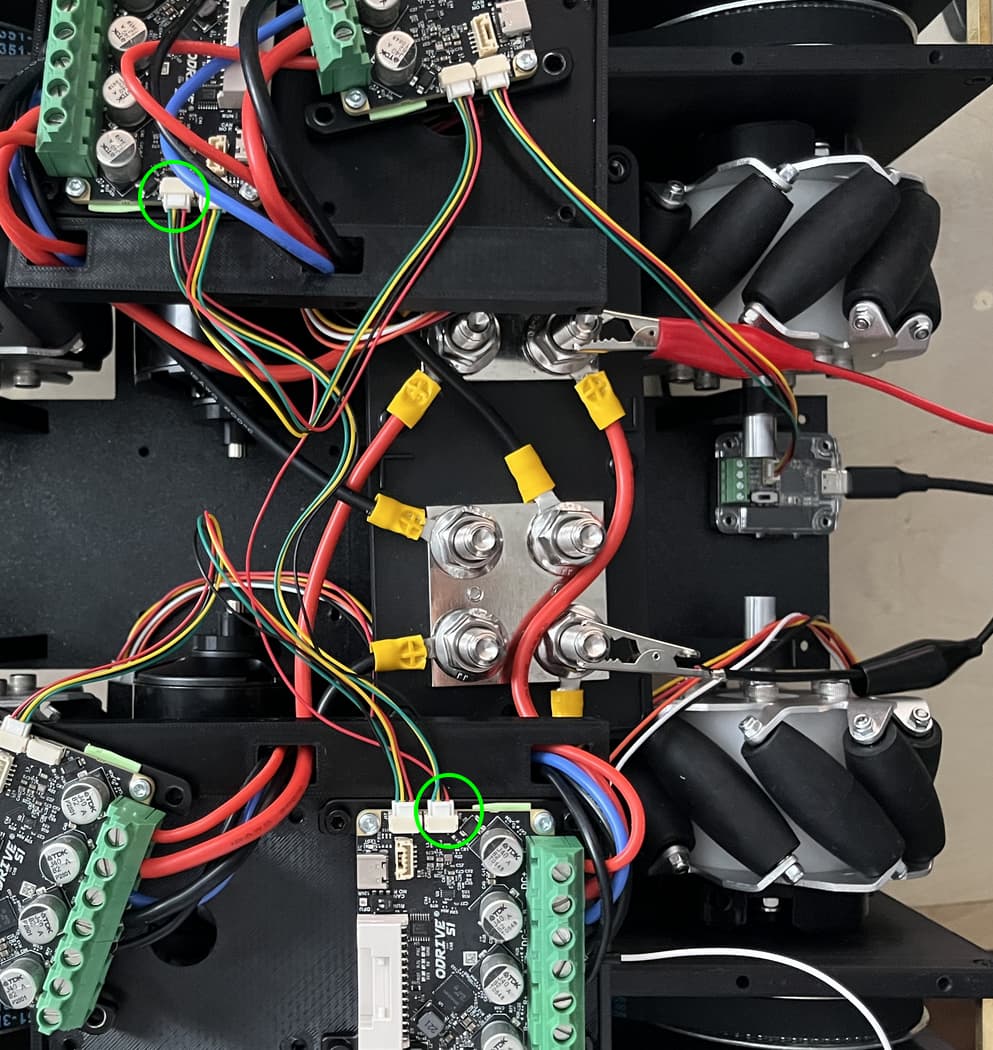
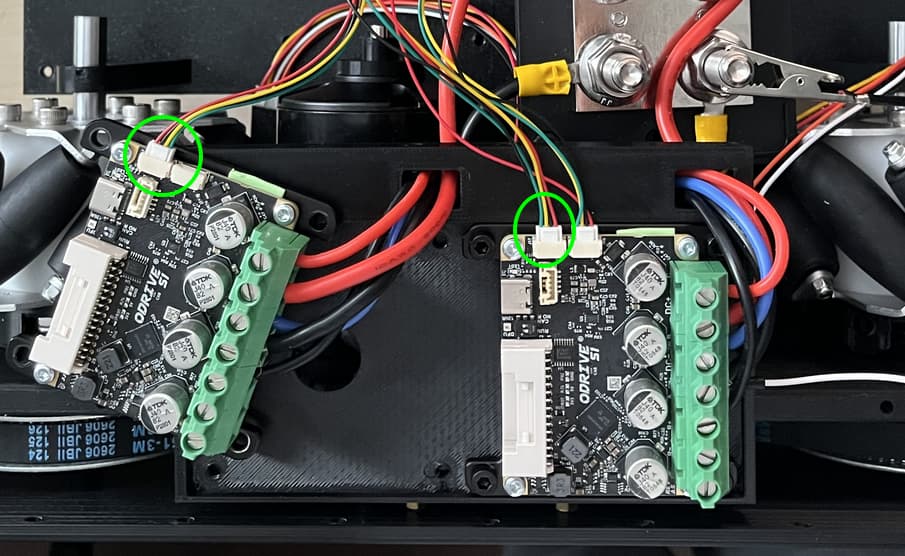
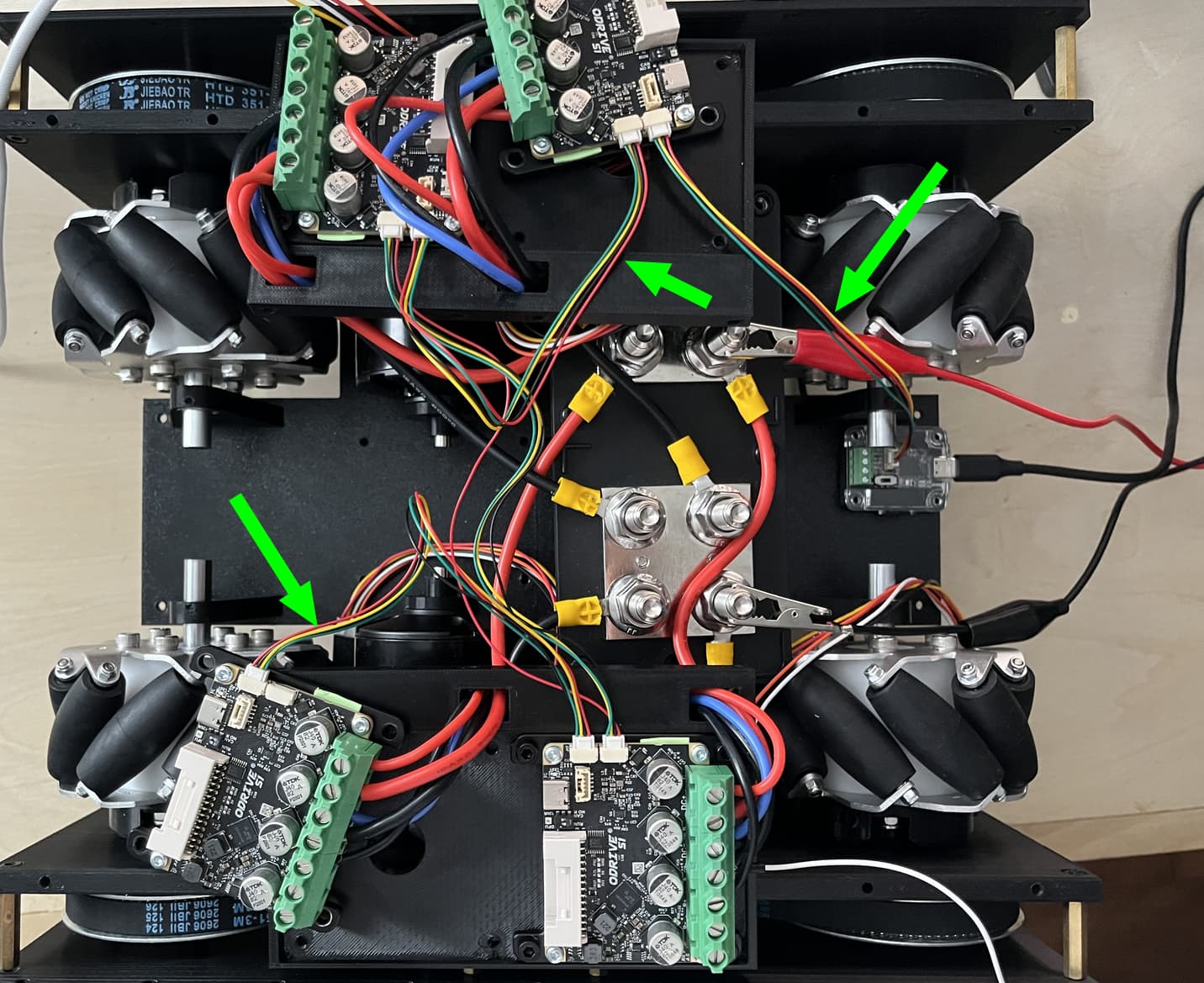
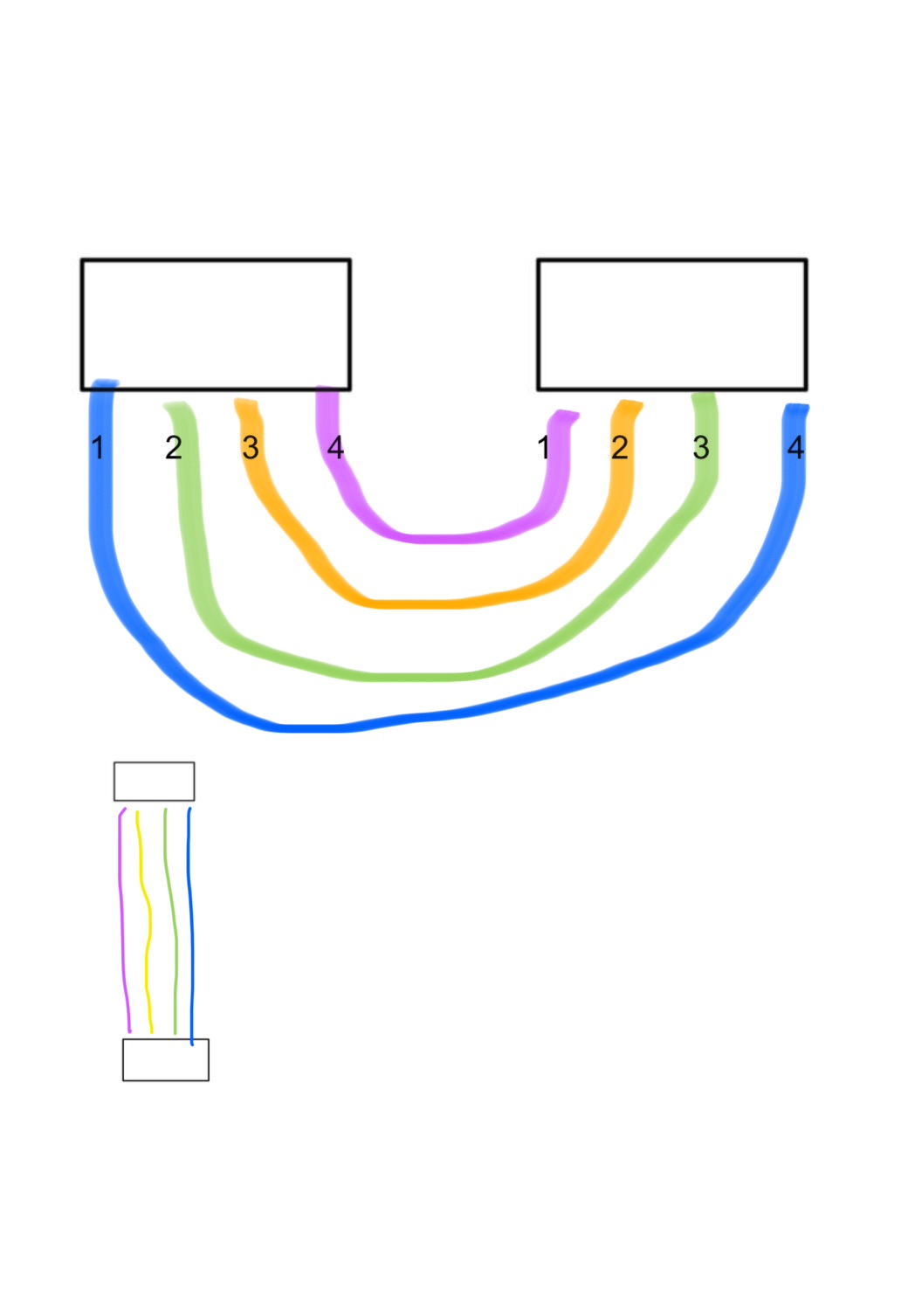
So this would 100% explain why only the second and third ODrive in the chain work – those are the only ones with the correct CAN wiring, the other two have CANH/CANL (as well as VBUS/GND, but that matters less in this configuration since you’re not externally powering the S1s over the CAN lines) swapped.
I’ve highlighted the CAN cables that have pinouts swapped, fix those and the whole setup should work!