While i was doing to sensorless mode
I try to use the command, “odrv0.axis0.controller.vel_setpoint = 400”
But…
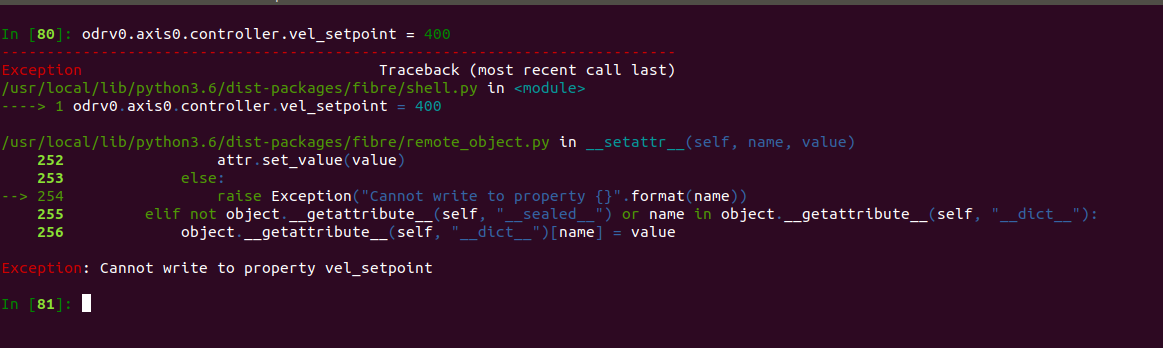
The Error is like this
While i was doing to sensorless mode
I try to use the command, “odrv0.axis0.controller.vel_setpoint = 400”
But…
If you updated to 0.5.1, vel_setpoint is now read only. You want to use input_vel instead. See the docs for updates.
ı use input_vel but my motor dont move with vel_gain = 0 and vel_integrator_gain = 0, ı dont want close loop but motor dont move without increase that parameters please help me
Hey Samet,
Closed loop control requires properly set gains.
You could try to control the motor in torque mode, however with no external load this will result in the motor quickly accelerating up to max speed.
I’d strongly recommend just tuning your gains, or setting them to some low value for testing - it’s not possible to do velocity control without closed loop control.
in torque mode robot dont do braking so its dangerous and fast, only ı have vel_gain and vel_integrator_gain, ı try all values, is there anything else from that?