I am unable to enter closed loop position control mode with the drive after motor/encoder calibration. I have tried it through the GUI and through python but no success.
I have 4 motor/drive pairs and only one is giving me trouble at the moment.
I am unable to enter closed loop position control mode with the drive after motor/encoder calibration. I have tried it through the GUI and through python but no success.
I have 4 motor/drive pairs and only one is giving me trouble at the moment.
What’s the specific error thrown after you try to enter closed loop?
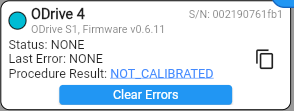
NOT_CALIBRATED is what I get
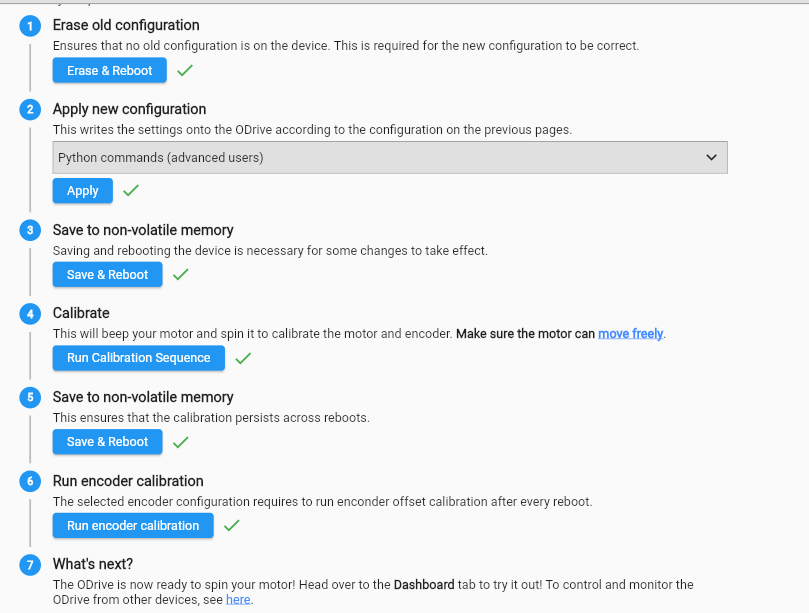
Something I dont yet understand is that I pass the calibration steps (green check marks) and still cannot go into position control mode:
When I try to enable position control for the axis on the dashboard I get this result:
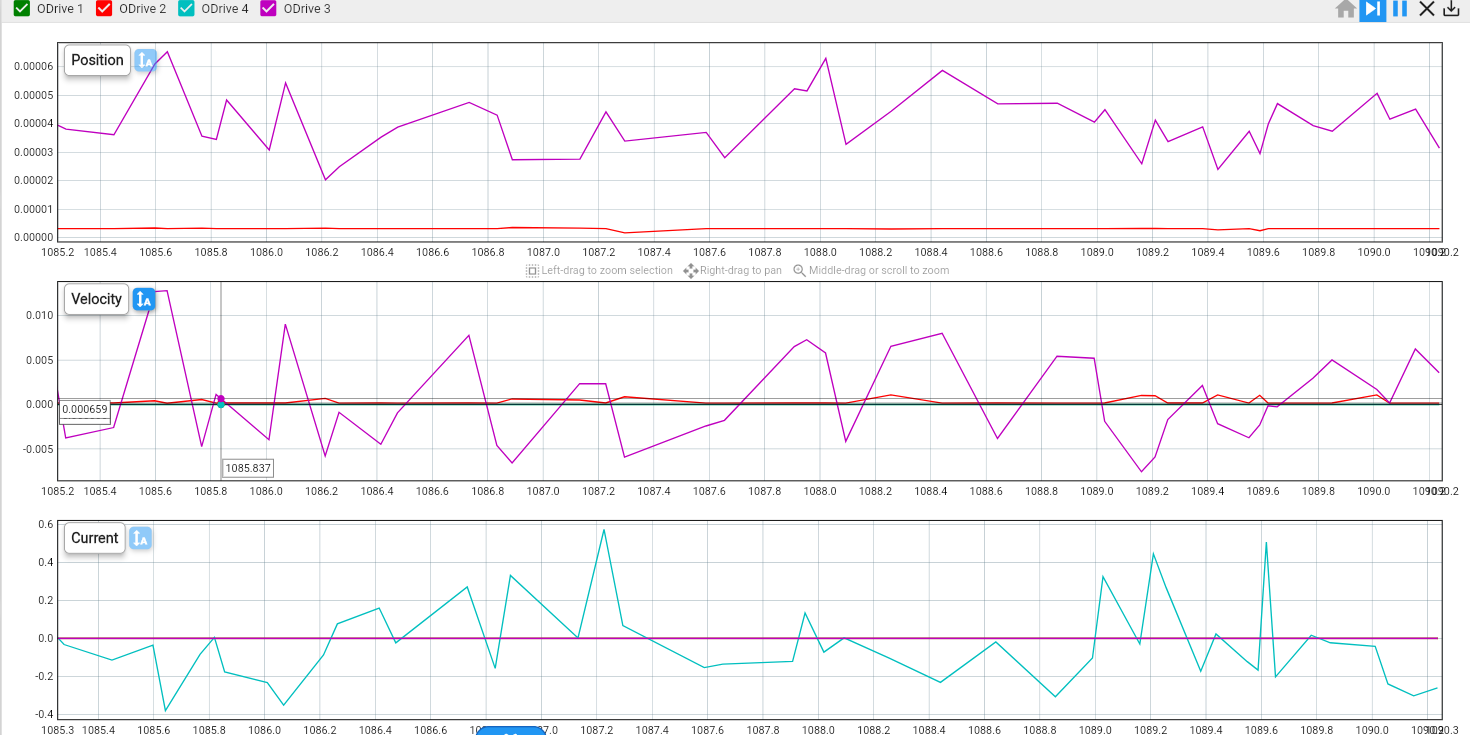
The dashboard also does not display position for my axis:
I have found my problem…and it was dumb.
I had a loose connection on one of my crimped wires for my absolute encoder - RS485-A connection.
Thank you for all of the help along the way solomon and I apologize for any headaches caused.
Long live ODrive.
Best,
Emi
Oh wow, I’m glad the fix was that simple! Very glad you figured it out! Please let me know if there’s anything else I can help with ![]()