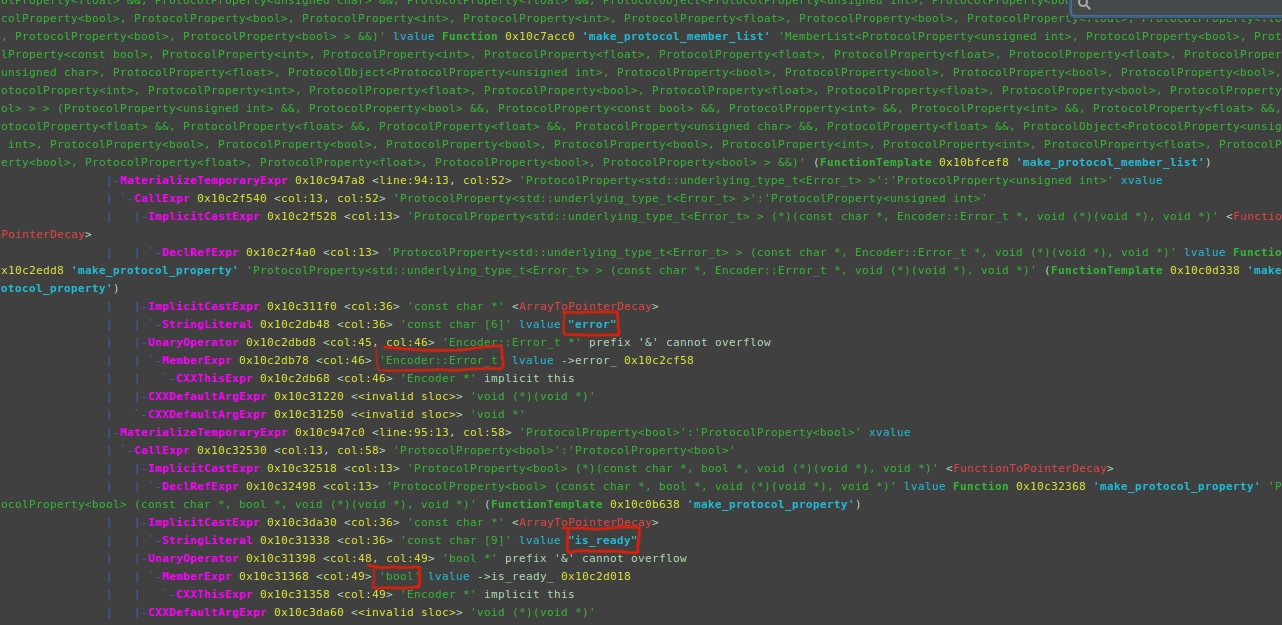
Fwiw, this is what the functions available in the Encoder class look like:
// Communication protocol definitions
auto make_protocol_definitions() {
return make_protocol_member_list(
make_protocol_property("error", &error_),
make_protocol_property("is_ready", &is_ready_),
make_protocol_property("index_found", const_cast<bool*>(&index_found_)),
make_protocol_property("shadow_count", &shadow_count_),
make_protocol_property("count_in_cpr", &count_in_cpr_),
make_protocol_property("interpolation", &interpolation_),
make_protocol_property("phase", &phase_),
make_protocol_property("pos_estimate", &pos_estimate_),
make_protocol_property("pos_cpr", &pos_cpr_),
make_protocol_property("hall_state", &hall_state_),
make_protocol_property("vel_estimate", &vel_estimate_),
// make_protocol_property("pll_kp", &pll_kp_),
// make_protocol_property("pll_ki", &pll_ki_),
make_protocol_object("config",
make_protocol_property("mode", &config_.mode),
make_protocol_property("use_index", &config_.use_index,
[](void* ctx) { static_cast<Encoder*>(ctx)->set_idx_subscribe(); }, this),
make_protocol_property("find_idx_on_lockin_only", &config_.find_idx_on_lockin_only,
[](void* ctx) { static_cast<Encoder*>(ctx)->set_idx_subscribe(); }, this),
make_protocol_property("pre_calibrated", &config_.pre_calibrated,
[](void* ctx) { static_cast<Encoder*>(ctx)->check_pre_calibrated(); }, this),
make_protocol_property("zero_count_on_find_idx", &config_.zero_count_on_find_idx),
make_protocol_property("cpr", &config_.cpr),
make_protocol_property("offset", &config_.offset),
make_protocol_property("offset_float", &config_.offset_float),
make_protocol_property("enable_phase_interpolation", &config_.enable_phase_interpolation),
make_protocol_property("bandwidth", &config_.bandwidth,
[](void* ctx) { static_cast<Encoder*>(ctx)->update_pll_gains(); }, this),
make_protocol_property("calib_range", &config_.calib_range),
make_protocol_property("idx_search_unidirectional", &config_.idx_search_unidirectional),
make_protocol_property("ignore_illegal_hall_state", &config_.ignore_illegal_hall_state)
)
);
}
It’s fairly well structured, so it might be possible to script something… But if someone feels like going through the firmware and finding all of the make_protocol_definitions() functions and documenting the entire protocol properly, that would be very beneficial