Hi, I was interested in controlling about 3 Odrives with a teensy microcontroller and was curious on how I’d go about doing that. If anyone has a page or video that could help me through this it would be very helpful, Thanks.
CAN bus is going to be your best bet.
That’s what I found through my own research as well. Thank you!
I tried to configure one of my ODrives for CAN using following the page on the website (CAN Bus Guide for ODrive — ODrive Pro Documentation 0.6.3 documentation), but I get this error. The version of Odrivetool is from the Devel branch of the GitHub, I don’t know if that version has the commands for CAN.
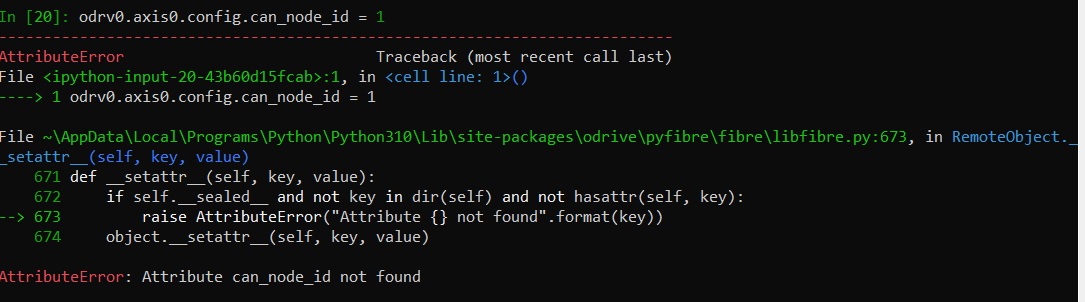
? The docs show that’s not the right command. It’s config.can.node_id, not can_node_id:
<odrv>.<axis>.config.can.node_id = <number>
I would look at the videos and programming of “OpenDog”. The videos are on youtube and the code can be found on gethub through James Bruton.

1 Like
Hi! Teensy has a lot of uarts, so you could you 3 of them for your odirves ![]()