Hi,
I run an Odrive V3.6 56V with FW 0.5.5
36V Powersuppley
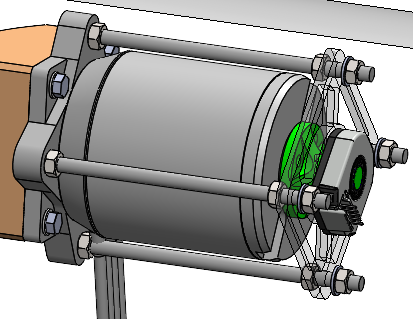
C6374 Electric Scooter Motor
amt103
use only Axis0
allready tried different FW and other HW
It drives a gantry of a XY-table with
traj
vel 60
acc 200
dec 200
also tried to lower encode bandwidth from 1000 to 200
I get one of these error after some rides:
In [1]: dump_errors(odrv0)
system: no error
axis0
axis: Error(s):
AxisError.MOTOR_FAILED
AxisError.CONTROLLER_FAILED
motor: Error(s):
MotorError.UNKNOWN_TORQUE
MotorError.UNKNOWN_VOLTAGE_COMMAND
DRV fault: none
sensorless_estimator: no error
encoder: no error
controller: Error(s):
ControllerError.SPINOUT_DETECTED
In [1]: dump_errors(odrv0)
system: no error
axis0
axis: Error(s):
AxisError.MOTOR_FAILED
motor: Error(s):
MotorError.CURRENT_SENSE_SATURATION
MotorError.UNKNOWN_CURRENT_MEASUREMENT
DRV fault: none
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
DRV fault: none
sensorless_estimator: no error
encoder: no error
controller: no error
here is how I mounted the encoder
pls help me !
THX a lot
this is the setup
{“axis0”: {“acim_estimator”: {“config”: {“slip_velocity”: 14.706000328063965}},
“config”: {“dir_gpio_pin”: 2,
“enable_sensorless_mode”: false,
“enable_step_dir”: false,
“enable_watchdog”: false,
“startup_closed_loop_control”: false,
“startup_encoder_index_search”: false,
“startup_encoder_offset_calibration”: false,
“startup_homing”: false,
“startup_motor_calibration”: false,
“step_dir_always_on”: false,
“step_gpio_pin”: 1,
“watchdog_timeout”: 0.0,
“calibration_lockin”: {“accel”: 20.0,
“current”: 10.0,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 40.0},
“can”: {“encoder_rate_ms”: 10,
“heartbeat_rate_ms”: 100,
“is_extended”: false,
“node_id”: 0},
“general_lockin”: {“accel”: 20.0,
“current”: 10.0,
“finish_distance”: 100.0,
“finish_on_distance”: false,
“finish_on_enc_idx”: false,
“finish_on_vel”: false,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 40.0},
“sensorless_ramp”: {“accel”: 200.0,
“current”: 10.0,
“finish_distance”: 100.0,
“finish_on_distance”: false,
“finish_on_enc_idx”: false,
“finish_on_vel”: true,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 400.0}},
“controller”: {“config”: {“axis_to_mirror”: 255,
“circular_setpoint_range”: 1.0,
“circular_setpoints”: false,
“control_mode”: 3,
“electrical_power_bandwidth”: 20.0,
“enable_gain_scheduling”: false,
“enable_overspeed_error”: true,
“enable_torque_mode_vel_limit”: true,
“enable_vel_limit”: true,
“gain_scheduling_width”: 10.0,
“homing_speed”: 0.25,
“inertia”: 0.0,
“input_filter_bandwidth”: 2.0,
“input_mode”: 5,
“load_encoder_axis”: 0,
“mechanical_power_bandwidth”: 20.0,
“mirror_ratio”: 1.0,
“pos_gain”: 30.0,
“spinout_electrical_power_threshold”: 10.0,
“spinout_mechanical_power_threshold”: -10.0,
“steps_per_circular_range”: 1024,
“torque_mirror_ratio”: 0.0,
“torque_ramp_rate”: 0.009999999776482582,
“vel_gain”: 0.20000000298023224,
“vel_integrator_gain”: 2.0,
“vel_integrator_limit”: Infinity,
“vel_limit”: 63.0,
“vel_limit_tolerance”: 1.2000000476837158,
“vel_ramp_rate”: 1.0,
“anticogging”: {“anticogging_enabled”: true,
“calib_anticogging”: false,
“calib_pos_threshold”: 1.0,
“calib_vel_threshold”: 1.0,
“cogging_ratio”: 1.0,
“index”: 0,
“pre_calibrated”: false}}},
“encoder”: {“config”: {“abs_spi_cs_gpio_pin”: 1,
“bandwidth”: 200.0,
“calib_range”: 0.019999999552965164,
“calib_scan_distance”: 50.26548385620117,
“calib_scan_omega”: 12.566370964050293,
“cpr”: 8192,
“direction”: 1,
“enable_phase_interpolation”: true,
“find_idx_on_lockin_only”: false,
“hall_polarity_calibrated”: false,
“hall_polarity”: 0,
“ignore_illegal_hall_state”: false,
“index_offset”: 0.0,
“mode”: 0,
“phase_offset_float”: 1.4478684663772583,
“phase_offset”: 4520,
“pre_calibrated”: false,
“sincos_gpio_pin_cos”: 4,
“sincos_gpio_pin_sin”: 3,
“use_index_offset”: true,
“use_index”: true}},
“max_endstop”: {“config”: {“debounce_ms”: 50,
“enabled”: false,
“gpio_num”: 0,
“is_active_high”: false,
“offset”: 0.0}},
“mechanical_brake”: {“config”: {“gpio_num”: 0,
“is_active_low”: true}},
“min_endstop”: {“config”: {“debounce_ms”: 50,
“enabled”: false,
“gpio_num”: 0,
“is_active_high”: false,
“offset”: 0.0}},
“motor”: {“config”: {“I_bus_hard_max”: Infinity,
“I_bus_hard_min”: -Infinity,
“I_leak_max”: 0.10000000149011612,
“R_wL_FF_enable”: false,
“acim_autoflux_attack_gain”: 10.0,
“acim_autoflux_decay_gain”: 1.0,
“acim_autoflux_enable”: false,
“acim_autoflux_min_Id”: 10.0,
“acim_gain_min_flux”: 10.0,
“bEMF_FF_enable”: false,
“calibration_current”: 10.0,
“current_control_bandwidth”: 5000.0,
“current_lim_margin”: 80.0,
“current_lim”: 100.0,
“dc_calib_tau”: 0.20000000298023224,
“inverter_temp_limit_lower”: 100.0,
“inverter_temp_limit_upper”: 120.0,
“motor_type”: 0,
“phase_inductance”: 2.881770342355594e-05,
“phase_resistance”: 0.049786001443862915,
“pole_pairs”: 7,
“pre_calibrated”: false,
“requested_current_range”: 60.0,
“resistance_calib_max_voltage”: 2.0,
“torque_constant”: 0.03999999910593033,
“torque_lim”: Infinity},
“fet_thermistor”: {“config”: {“enabled”: true,
“temp_limit_lower”: 100.0,
“temp_limit_upper”: 120.0}},
“motor_thermistor”: {“config”: {“enabled”: false,
“gpio_pin”: 4,
“poly_coefficient_0”: 0.0,
“poly_coefficient_1”: 0.0,
“poly_coefficient_2”: 0.0,
“poly_coefficient_3”: 0.0,
“temp_limit_lower”: 100.0,
“temp_limit_upper”: 120.0}}},
“sensorless_estimator”: {“config”: {“observer_gain”: 1000.0,
“pll_bandwidth”: 1000.0,
“pm_flux_linkage”: 0.0015800000401213765}},
“trap_traj”: {“config”: {“accel_limit”: 200.0,
“decel_limit”: 150.0,
“vel_limit”: 60.0}}},
“axis1”: {“acim_estimator”: {“config”: {“slip_velocity”: 14.706000328063965}},
“config”: {“dir_gpio_pin”: 8,
“enable_sensorless_mode”: false,
“enable_step_dir”: false,
“enable_watchdog”: false,
“startup_closed_loop_control”: false,
“startup_encoder_index_search”: false,
“startup_encoder_offset_calibration”: false,
“startup_homing”: false,
“startup_motor_calibration”: false,
“step_dir_always_on”: false,
“step_gpio_pin”: 7,
“watchdog_timeout”: 0.0,
“calibration_lockin”: {“accel”: 20.0,
“current”: 10.0,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 40.0},
“can”: {“encoder_rate_ms”: 10,
“heartbeat_rate_ms”: 100,
“is_extended”: false,
“node_id”: 1},
“general_lockin”: {“accel”: 20.0,
“current”: 10.0,
“finish_distance”: 100.0,
“finish_on_distance”: false,
“finish_on_enc_idx”: false,
“finish_on_vel”: false,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 40.0},
“sensorless_ramp”: {“accel”: 200.0,
“current”: 10.0,
“finish_distance”: 100.0,
“finish_on_distance”: false,
“finish_on_enc_idx”: false,
“finish_on_vel”: true,
“ramp_distance”: 3.1415927410125732,
“ramp_time”: 0.4000000059604645,
“vel”: 400.0}},
“controller”: {“config”: {“axis_to_mirror”: 255,
“circular_setpoint_range”: 1.0,
“circular_setpoints”: false,
“control_mode”: 3,
“electrical_power_bandwidth”: 20.0,
“enable_gain_scheduling”: false,
“enable_overspeed_error”: true,
“enable_torque_mode_vel_limit”: true,
“enable_vel_limit”: true,
“gain_scheduling_width”: 10.0,
“homing_speed”: 0.25,
“inertia”: 0.0,
“input_filter_bandwidth”: 2.0,
“input_mode”: 1,
“load_encoder_axis”: 1,
“mechanical_power_bandwidth”: 20.0,
“mirror_ratio”: 1.0,
“pos_gain”: 20.0,
“spinout_electrical_power_threshold”: 10.0,
“spinout_mechanical_power_threshold”: -10.0,
“steps_per_circular_range”: 1024,
“torque_mirror_ratio”: 0.0,
“torque_ramp_rate”: 0.009999999776482582,
“vel_gain”: 0.1666666716337204,
“vel_integrator_gain”: 0.3333333432674408,
“vel_integrator_limit”: Infinity,
“vel_limit”: 2.0,
“vel_limit_tolerance”: 1.2000000476837158,
“vel_ramp_rate”: 1.0,
“anticogging”: {“anticogging_enabled”: true,
“calib_anticogging”: false,
“calib_pos_threshold”: 1.0,
“calib_vel_threshold”: 1.0,
“cogging_ratio”: 1.0,
“index”: 0,
“pre_calibrated”: false}}},
“encoder”: {“config”: {“abs_spi_cs_gpio_pin”: 1,
“bandwidth”: 1000.0,
“calib_range”: 0.019999999552965164,
“calib_scan_distance”: 50.26548385620117,
“calib_scan_omega”: 12.566370964050293,
“cpr”: 8192,
“direction”: 0,
“enable_phase_interpolation”: true,
“find_idx_on_lockin_only”: false,
“hall_polarity_calibrated”: false,
“hall_polarity”: 0,
“ignore_illegal_hall_state”: false,
“index_offset”: 0.0,
“mode”: 0,
“phase_offset_float”: 0.0,
“phase_offset”: 0,
“pre_calibrated”: false,
“sincos_gpio_pin_cos”: 4,
“sincos_gpio_pin_sin”: 3,
“use_index_offset”: true,
“use_index”: false}},
“max_endstop”: {“config”: {“debounce_ms”: 50,
“enabled”: false,
“gpio_num”: 0,
“is_active_high”: false,
“offset”: 0.0}},
“mechanical_brake”: {“config”: {“gpio_num”: 0,
“is_active_low”: true}},
“min_endstop”: {“config”: {“debounce_ms”: 50,
“enabled”: false,
“gpio_num”: 0,
“is_active_high”: false,
“offset”: 0.0}},
“motor”: {“config”: {“I_bus_hard_max”: Infinity,
“I_bus_hard_min”: -Infinity,
“I_leak_max”: 0.10000000149011612,
“R_wL_FF_enable”: false,
“acim_autoflux_attack_gain”: 10.0,
“acim_autoflux_decay_gain”: 1.0,
“acim_autoflux_enable”: false,
“acim_autoflux_min_Id”: 10.0,
“acim_gain_min_flux”: 10.0,
“bEMF_FF_enable”: false,
“calibration_current”: 10.0,
“current_control_bandwidth”: 1000.0,
“current_lim_margin”: 8.0,
“current_lim”: 10.0,
“dc_calib_tau”: 0.20000000298023224,
“inverter_temp_limit_lower”: 100.0,
“inverter_temp_limit_upper”: 120.0,
“motor_type”: 0,
“phase_inductance”: 0.0,
“phase_resistance”: 0.0,
“pole_pairs”: 7,
“pre_calibrated”: false,
“requested_current_range”: 60.0,
“resistance_calib_max_voltage”: 2.0,
“torque_constant”: 0.03999999910593033,
“torque_lim”: Infinity},
“fet_thermistor”: {“config”: {“enabled”: true,
“temp_limit_lower”: 100.0,
“temp_limit_upper”: 120.0}},
“motor_thermistor”: {“config”: {“enabled”: false,
“gpio_pin”: 4,
“poly_coefficient_0”: 0.0,
“poly_coefficient_1”: 0.0,
“poly_coefficient_2”: 0.0,
“poly_coefficient_3”: 0.0,
“temp_limit_lower”: 100.0,
“temp_limit_upper”: 120.0}}},
“sensorless_estimator”: {“config”: {“observer_gain”: 1000.0,
“pll_bandwidth”: 1000.0,
“pm_flux_linkage”: 0.0015800000401213765}},
“trap_traj”: {“config”: {“accel_limit”: 0.5,
“decel_limit”: 0.5,
“vel_limit”: 2.0}}},
“can”: {“config”: {“baud_rate”: 250000,
“protocol”: 1}},
“config”: {“brake_resistance”: 2.0,
“dc_bus_overvoltage_ramp_end”: 59.92000198364258,
“dc_bus_overvoltage_ramp_start”: 59.92000198364258,
“dc_bus_overvoltage_trip_level”: 59.92000198364258,
“dc_bus_undervoltage_trip_level”: 8.0,
“dc_max_negative_current”: -0.009999999776482582,
“dc_max_positive_current”: Infinity,
“enable_brake_resistor”: true,
“enable_can_a”: true,
“enable_dc_bus_overvoltage_ramp”: false,
“enable_i2c_a”: false,
“enable_uart_a”: true,
“enable_uart_b”: false,
“enable_uart_c”: false,
“error_gpio_pin”: 0,
“gpio10_mode”: 11,
“gpio11_mode”: 2,
“gpio12_mode”: 12,
“gpio13_mode”: 12,
“gpio14_mode”: 2,
“gpio15_mode”: 7,
“gpio16_mode”: 7,
“gpio1_mode”: 4,
“gpio2_mode”: 4,
“gpio3_mode”: 3,
“gpio4_mode”: 3,
“gpio5_mode”: 3,
“gpio6_mode”: 0,
“gpio7_mode”: 0,
“gpio8_mode”: 0,
“gpio9_mode”: 11,
“max_regen_current”: 0.0,
“uart0_protocol”: 3,
“uart1_protocol”: 3,
“uart2_protocol”: 3,
“uart_a_baudrate”: 115200,
“uart_b_baudrate”: 115200,
“uart_c_baudrate”: 115200,
“usb_cdc_protocol”: 3,
“gpio1_pwm_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0},
“gpio2_pwm_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0},
“gpio3_analog_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0},
“gpio3_pwm_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0},
“gpio4_analog_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0},
“gpio4_pwm_mapping”: {“endpoint”: null,
“max”: 0.0,
“min”: 0.0}}}