Is oDrive a really bad fit for Large DC motors? Looking to drive wheel chair motors and I happen to have a spare oDrive. What does brushed motor support look like? Only looking for proportional control fwd/backwards for now.
MAX peak stall current of 120amps @24 Volts but only for milliseconds potentially at startup
Constant current around 10 amps @24 Volts
Is the Hardware Capable of this?
Yes I know all the hard work that has gone into FOC on the odrive would be wasted.
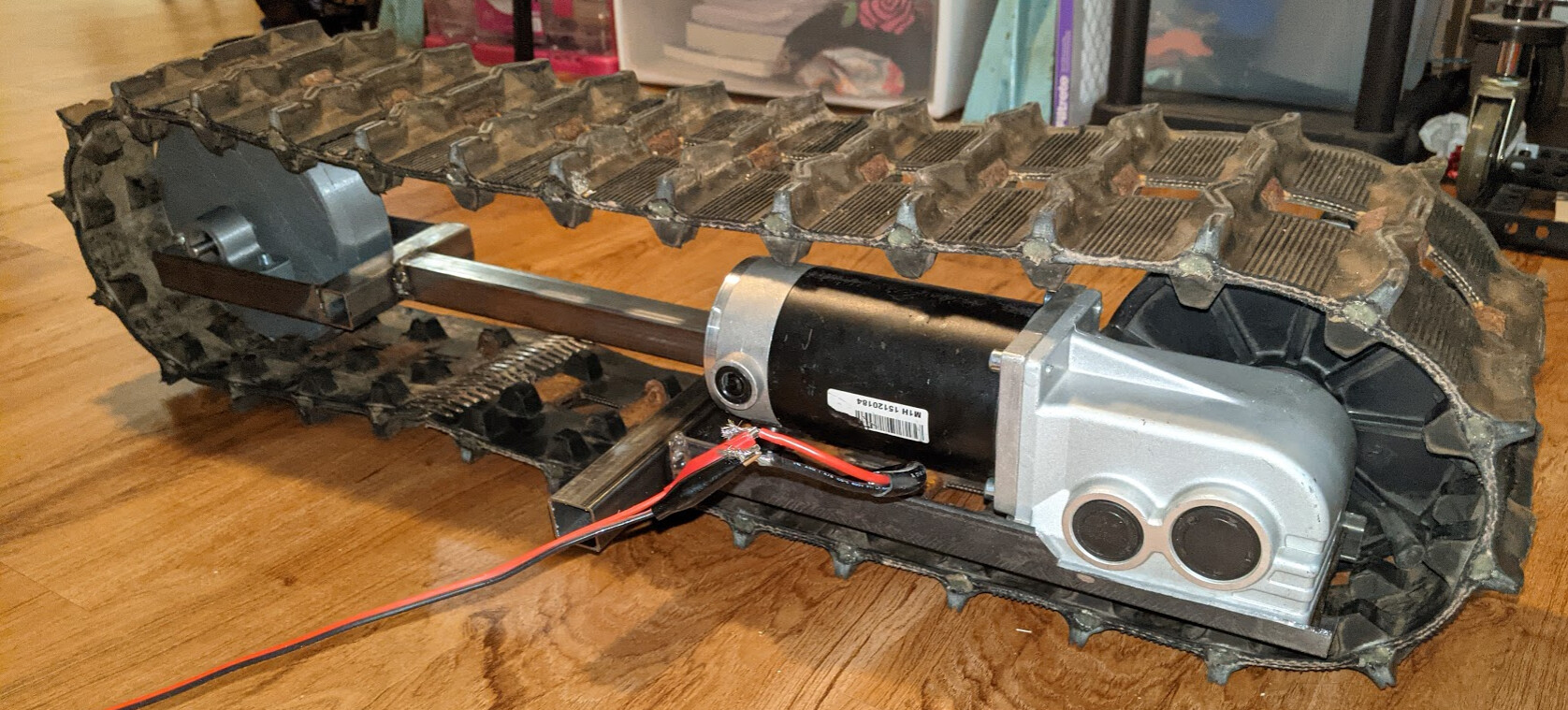
How much for that assembly, and how many of them can you make in a month.
I also want a high-torque version that has motors on both ends of the track.
You also need to watch those track lugs and interference with the motor mount. I have a heavy Bobcat MT55 track that seems to take a rather large amount of torque to get moving, and I’ve got 4 heavy lead acid batteries so I’m going quite a bit over the motor’s continuous current rating to start moving or turn.
If you watch https://vimeo.com/502888157 you will also see it moving, and I’m running 24V motors at ~50V input to the odrive, which is fine until you stall the motor and try to move and overvoltage the FETS, at which point they short out and make nice little arc flashes on the fuses when I try to put them back