Hello,
We are configuring a 2048 incremental encoder on a Electrocraft MPW52.
We have followed the wiring guide and this has previously worked on a 3.6 dual Odrive with the same settings for the motor.
We moved to the ODrive pro and have repeated our same encoder wiring, color for color from the encoders but we are not having any success.
At one point with the encoders wired very very wrong it actually skipped onto NO_RESPONSE instead of DISARMED. When we look at the disarm reason it’s 2 which is SYSTEM_LEVEL and the guide said “Unexpected system error such as memory corruption, stack overflow frozen thread, asset fail etc. This error is indicates firmware bug”… But we have the latest firmware. What am I missing and how is this better than the previous Odrive that actually worked?
Shouldn’t the motor calibration settings be identical to what we used previously? We have been using the GUI tool but we also confirmed the same behavior via the odrivetool as well.
I’m really stuck here. Any help much appreciated!
This is the encoder color code and where they are wired to on the Odrive Pro connector.
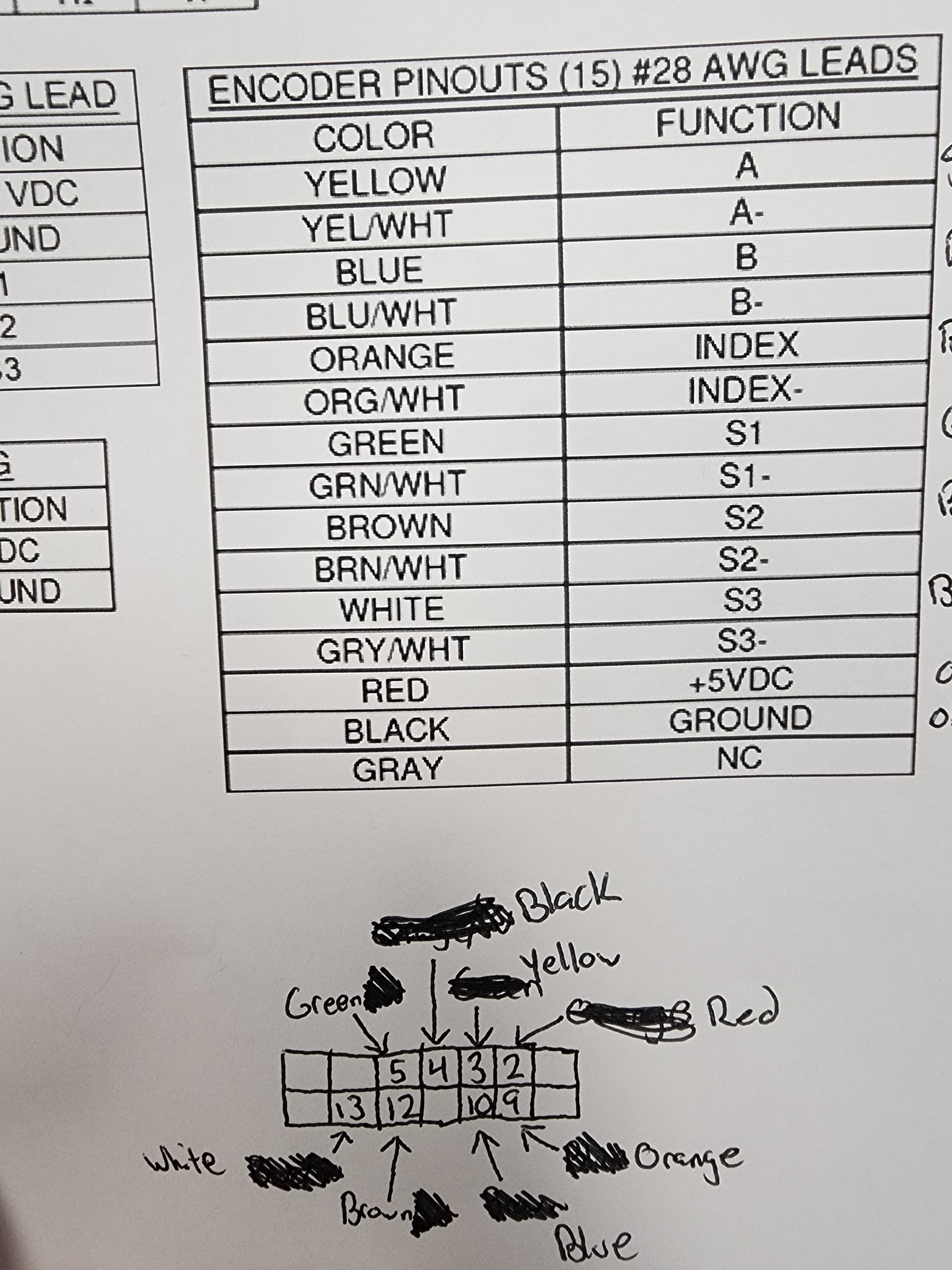
This is how it was wired to the previous 3.6 dual channel:
5v, Yellow (A), Blue (B), Orange (Z), gnd
I tried to add a second picture but I’m limited to one picture atm…
Also we do see the encoders counting up and down properly under the dashboard view when we call the inc_encoder0 raw data