E3D are releasing a “Tool changer and Motion System” as the basis of a 3D printer that you then add the control board etc. too. Could people who have used ODrive for 3D printing give advice on what works best for such a system. The stepper on the Z axis isn’t very tall is there anyway of using ODrive here ?
I had the same idea when I found out about odrive last spring. but looking thru the forum looks like using bldc motors in 3d printer isn’t that popular.
Maybe someone can help me out with picking out a motor, I don’t have any experience with bldc motors so this is new to me.
I’m currently in design phase for a Core XY printer its belt driven with 20th pulley. I want to use bldc motors for XY movement and the reason behind this is to decrease time in the none print moves.
Can some one give me advice in the calculation to selecting the needed motor
Hopefully I will be able to fashion an adapter to make them fit. I’ll have to get some custom shafts made as well. I presume I will be able to use a larger GT2 pulley than the standard one they are using on the steppers and compensate for it in software.
madcowswe
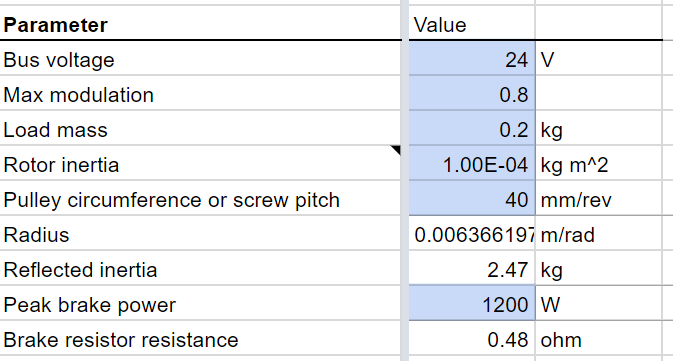
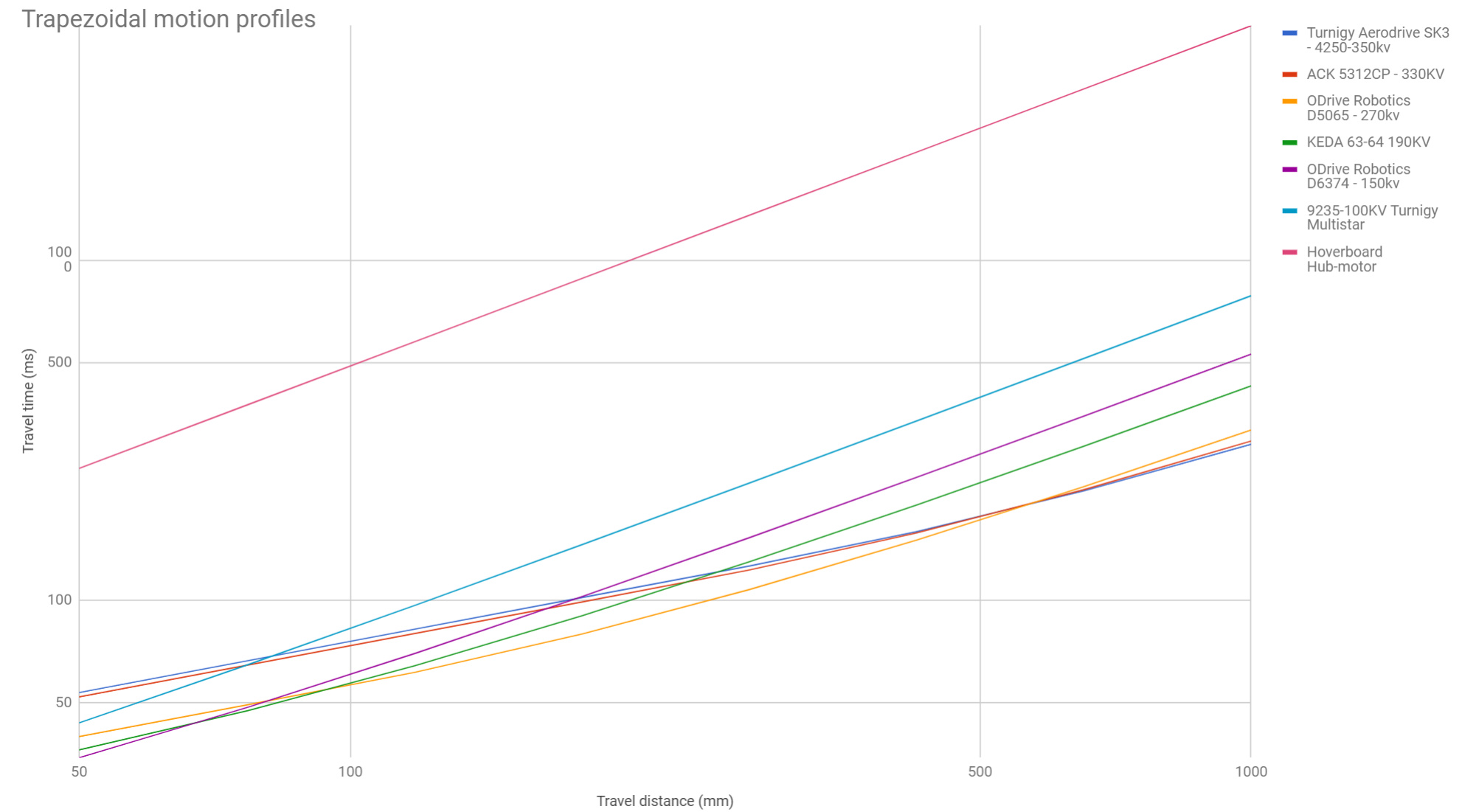
Looking in to the spreed sheet, with D5065 270kv motor at distance of 47mm my carriage will be traveling around 3420mm/s. Just making sure I understood it correctly.
I’ll post the results but it may be a while as they haven’t released the printer yet and are only releasing the design files when that happens. I think I may be able to mount the motors the same way they are mounting the steppers (holes slightly wider) and mount the encoder directly onto the frame.
Hi @madcowswe could you tell me how I can figure out how much steps per revolution I could get with D5065 and CUI AMT102 encoder using same set up as previous post.
It doesn’t excatly work the same way as steppers, but the encoder resolution would be 8192 counts/rev, which in the ideal case is somewhat comparable to steps/rev.