No practical effect, but where you mount the encoder will dictate your counts per rev setting for that axis.
If the encoder is mounted to the shaft of the motor you’ll effectively be multiplying its resolution by the gear reduction, 5x in your proposed case. You would still use the encoder’s actual counts per rev value for the axis’ encoder setting. If the encoder is mounted on the “1” side of the 5:1 you’ll be reducing its resolution. In this latter case you would also to set your counts per rev on that axis to your encoder’s counts per rev divided by your gear reduction.
Your best option is to mount the encoder on the motor shaft so that you’re multiplying its resolution.
note that having the encoder on the 1 side will mean you measure the actual position of the arm, so if the belt stretches, the output position will not change
the increased accuracy of being on the 5 side may not matter to you, and may just result in the board having to work harder to count pulses.
what resolution is your encoder, and how precise do you need the final position to be?
How precise? I hope it is possible to train/code the ODrive/Motors to stop within the 5mm from top and bottom of the ball screw. A 300mm ball screw using 290mm.
D, if you can see any foolishness with in this text, please feel free to intervene.
As I’m a here from an earlier part of this century, not growing up with this new technology, I may be on the wrong track! however that doesn’t I can’t learn something new with the grace of mind of bright young people, such as yourself
saying 5mm at the top of the ball screw doesn’t help (other than t tell me your accuracy requierments are probably not much)
what it the pitch of the ball screw? what you need to figure out is how many degrees of motor movement are acceptable.
My guess is that you are talking about an accuracy requirement that gives you a window of around a full revolution of the shaft (so 5 revolutions of the motor), if that’s the case, then your accuracy requirements are very low (around here people are commonly talking about accuracy requirements << 1 degree)
frankly, with such loose limits, if you are only needing to move to two positions, odrive is massive overkill, all you need is a DC motor and limit switches to get accuracy within a mm or two.
Yes "accuracy requirements " you are correct; as long as the ball doesn’t crash into the BF or BK I will be happy. (at this point in time)
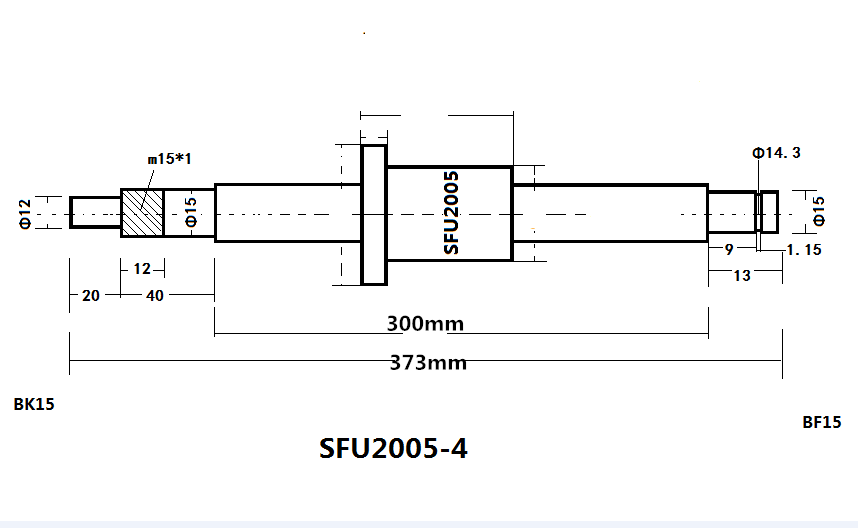
Pitch of the ball screw, 20mm-05mm (SFU2005) as in the image I attached.
And Yes I know, this sounds loose, however its more about two primary attributes of this test.
The operative word being test!
The first being price! (long story short) Last 6 months spent on qualifying servos for this sim platform, the Odrive and motors come in at half the investment for similar powered products.
Secondly, will it take the place of all the complicated and unnecessary items (like limit switches) that are used on sim actuators now.
Now the 1 deg or less accuracy is not a hight priority at this point as its primarily a testing stage.
However if it fits in the space as I am hoping it will, then I will definitely work on the accuracy!
Hi tomsepe, yes they have been very good, with knowledge, parts and fast delivery, and in some cases better than my local businesses; considering I’m in Australia and they are in the UK.
I have purchased nearly all the connection hardware (nuts bolts ect) from them, faster and cheaper than was available here at home.

 here from an earlier part of this century, not growing up with this new technology, I may be on the wrong track! however that doesn’t I can’t learn something new with the grace of mind of bright young people, such as yourself
here from an earlier part of this century, not growing up with this new technology, I may be on the wrong track! however that doesn’t I can’t learn something new with the grace of mind of bright young people, such as yourself 

