Hi,all
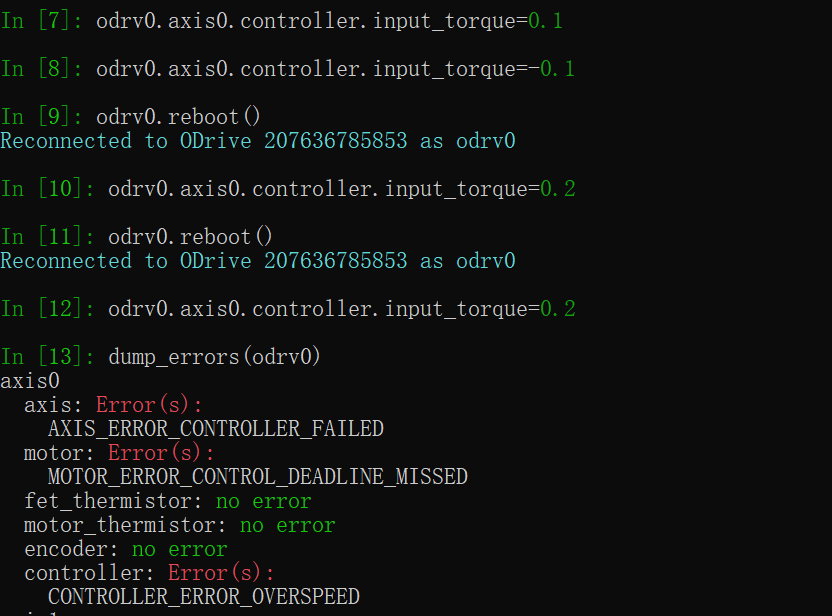
I have an encoder with index signal.I was told that I need to run “encoder offset calibration"only once,and after that just search for the index signal every boot. But I found that, I have to run “encoder offset calibration” every boot,too. If not,the motor will work only for the first time after odrivetool sent command. And after running"reboot”, errors showed like this:
What are the reasons of these errors?
2.Does the encoder need startup_encoder_offset_calibration? If not, how can I avoid these errors? If yes, odrive may be not suitable for my project (it would be disappointing).
I’d appreciate it if you could help me.
Hi Wetmelon,
Thank you for your reply. I configured my encoder as you said, and I mounted a gear reducer to increase the load on the motor. The motor works much better than before,though those errors still exist sometimes, but it will work normally after reboot now! I think I can solve the problem thoroughly. Thanks a lot!