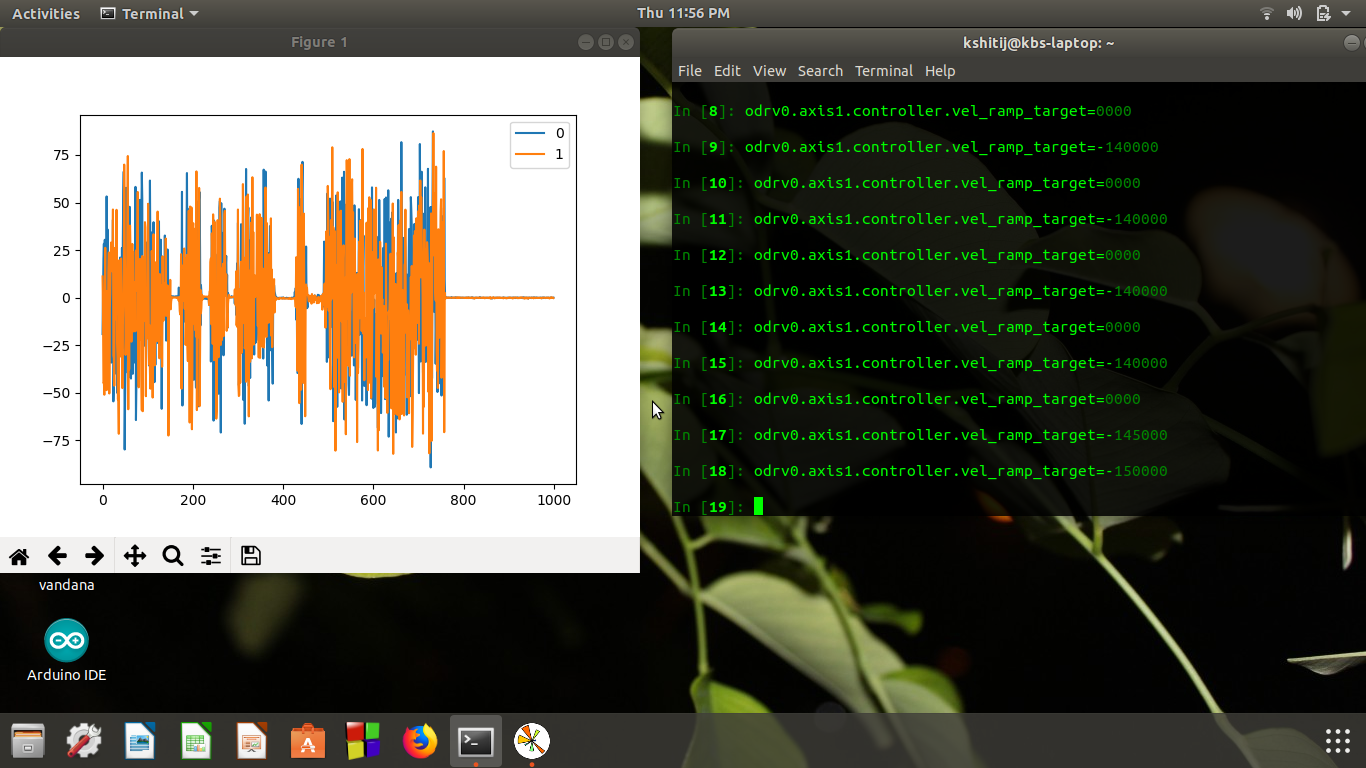
I am using 170 KV Tiger motor U10 plus with a gear reductio of 3:1 with Odrive V3.5 with firmware 4.0.11 .I am using it on a wheeled bot and in it ,on a particular wheel in only anticlockwise sense of rotation only ,also at velocity greater than 148000cps ,consistently . I saw in firmware that this error occurs when phase current is greater than overcurrent_trip level so i plotted both current_meas_phB and current_meas_phC
also , my current control configurations are
p_gain = 0.007478765211999416 (float) i_gain = 31.64048194885254 (float) v_current_control_integral_d = 0.0 (float) v_current_control_integral_q = 0.0 (float) Ibus = 0.0 (float) final_v_alpha = 0.0 (float) final_v_beta = 0.0 (float) Iq_setpoint = 0.0 (float) Iq_measured = 0.0 (float) Id_measured = 0.0 (float) I_measured_report_filter_k = 1.0 (float) max_allowed_current = 121.5 (float) overcurrent_trip_level = 135.0 (float)
so the current is far below overcurrent_trip level , so how can it be corrected?
Thanks
Bithel