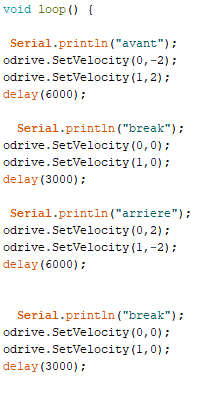
I use motor hoverbord with encoder hall effect . I face this problem (MOTOR_ERROR_CURRENT_SENSE_SATURATION) when I start my two motor at the same time. in position mode (MODE_TRAP_TRAJ) . with this simple code arduino
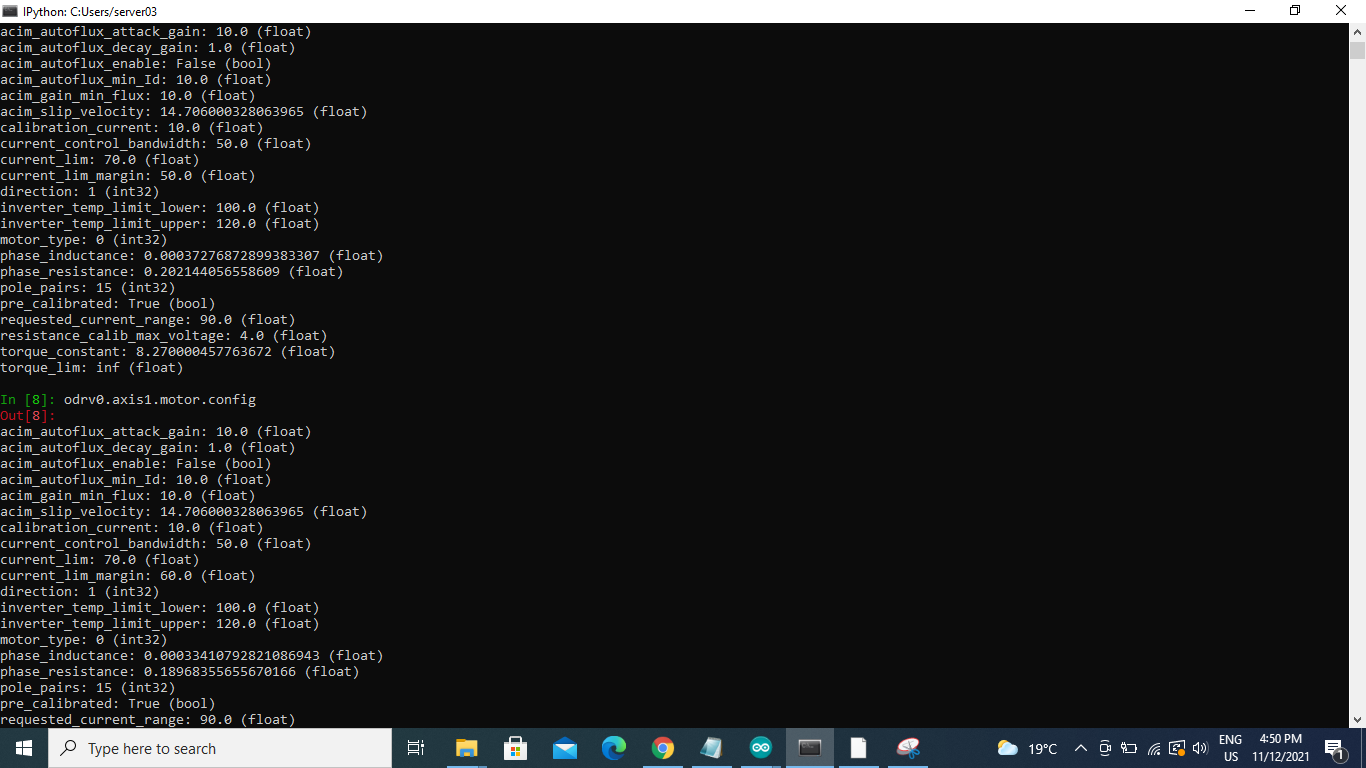
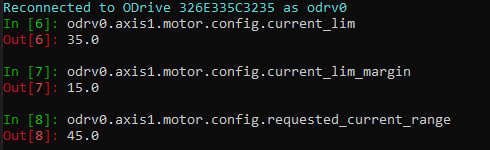
as you see ,I tried to increase requested_current_range and current_lim and current_lim_margin .
and also I tried to current_lim_margin=50 ; current_lim=40 ; requested_current_range =90 ;
please help me solve this problem, it’s been a week since I have been blocked here
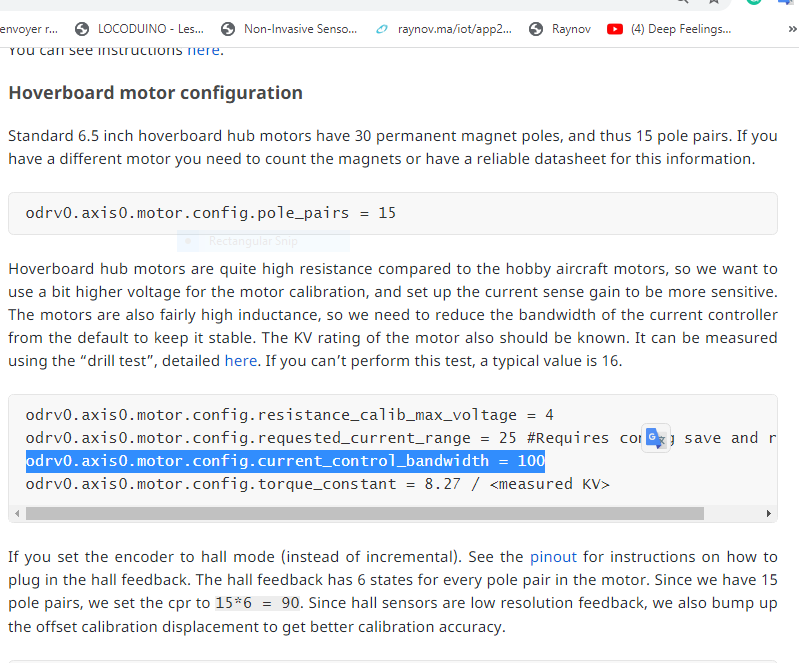
in tutorial hovorbord guide they put Current_control_bandwidth=100 . I set Current_control_bandwidth to 50 because in 100 the MOTOR_ERROR_CURRENT_SENSE_SATURATION is coming quickly .
also i tried Current_control_bandwidth in 500 and 1000 , the error also happens too quickly with poor current stabilization and motor vibration
I want to tell you more information, it may be related to our problem ‘’ [ERROR_CURRENT_SENSE_SATURATION "
as you see in the tutorial hoverbord it is indicated to be configured to
"motor.config.torque_constant = 8.27 / " and KV=16 so 8.27/16 =0.51 .
so when i put "motor.config.torque_constant = 0.51 " the motor starts to vibrate in a brutal way .
and when I increase to 8. he calms down and I can control it .
what i should do in this situation?
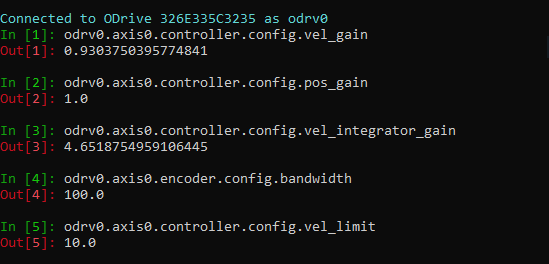
And with that I impact my “vel_gain” because I configured it with “odrv0.axis0.controller.config.vel_gain = 0.02 * odrv0.axis0.motor.config.torque_constant * odrv0.axis0.encoder.config.cpr” as it is indicated in the guide hoverboard of course.
Which that give vel_gain= 14.86
(motor hoverbord +hall sensor feedback) @Wetmelon . The motor vibration problem is almost solved. by change control_mode, MODE_POSITION to MODE_VELOCITY . with this configuration indicated in the guide :
the same thing for Axis1 .
but the biggest problem we encounter is [ERROR_CURRENT_SENSE_SATURATION ] , which occurs in ( axis1) after about 4 minutes of turning the motor .
using this simple arduino code
And sometimes I get [ MOTOR_ERROR_CURRENT_LIMIT_VIOLATION ] if I manipulat with configuration ( current_lim_margin ; config.current_lim ; requested_current_range)