My setup:
is a Odrive 3.6 / 56V hardware connected to a BLDC motor (eX8108-105kV with 21 pole pairs) and the Encoder 5047 with the incremental interface
Behaviour:
Running the firmware version 0.4.11 as well as 0.4.12 it works fine. (e.g. closed loop and move to position…)
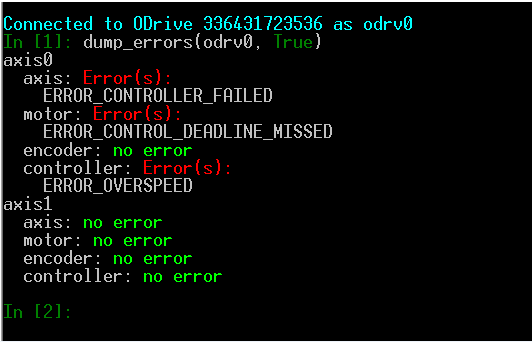
Running the firmware version rc-v0.5.0 - the full calibration sequence works
but the closed loop fails with the “ERROR_OVERSPEED” message.
I tried to change the parameter vel_limit (6000-300000) and vel_gain(0.00025-0.004) but no success
only the setting “odrv0.axis0.controller.config.enable_overspeed_error = False” results in correct functionality like before.
What is the risk of disabling the overspeed error ?
Are there any other settings to handle this problem ?
(the same problem with the SPI devel branch )