Hi, I read the Motor::Foc_current function and i find the park transform use I_phase as electrical angle,but the inverse park transform use pwm_phase,and the relation is about pwm_phase=I_phase+1.5f*current_meas_period * phase_vel. I am a little ambiguous why park and inverse park transform use different angle,and why mutiply 1.5f in the equation of pwm_phase and I_phase?Thanks a lot… 
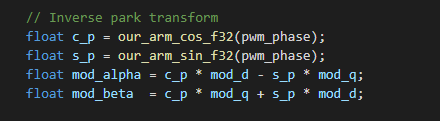
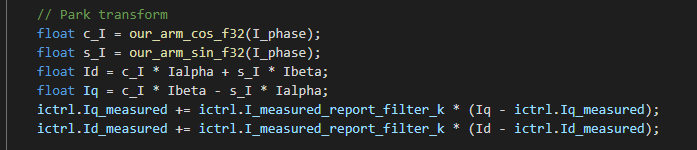
The reason is that the current measurement and the PWM application happen approximately 1.5 control cycles apart, i.e. not at the same time.
OK,I got it and Thanks a lot 