Hello everyone ! I would like to know what is missing to achieve
1° odrive calibrated without errors
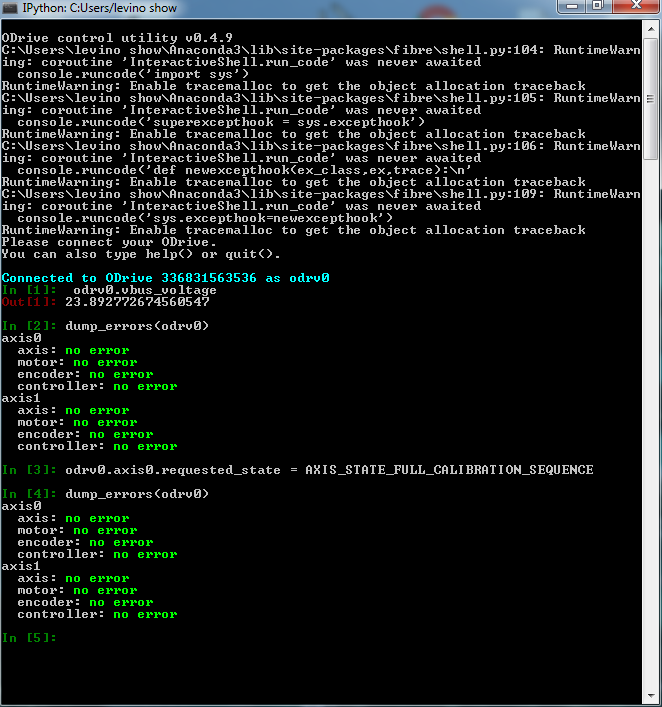
2° odrv0.config
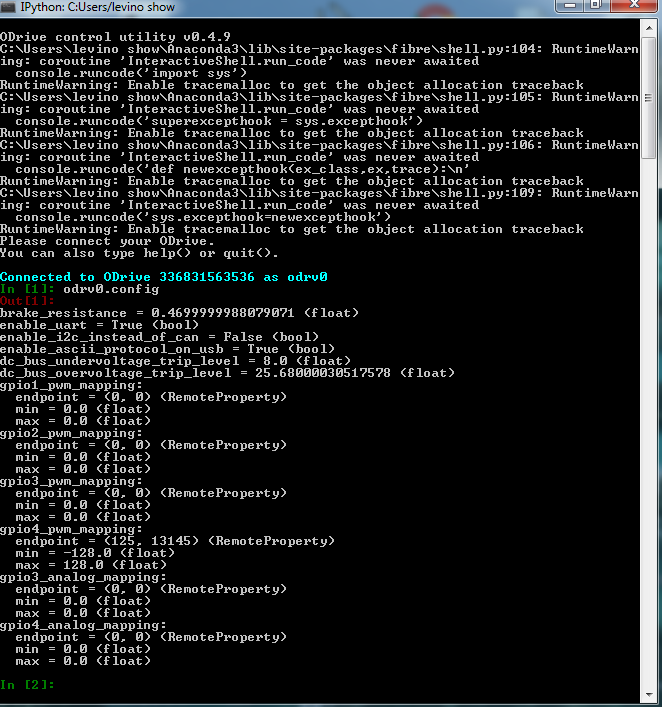

mapping gpio4
I want to control this displacement motor and position with the pwm that comes from this board

gnd on pwm signal on gpio4
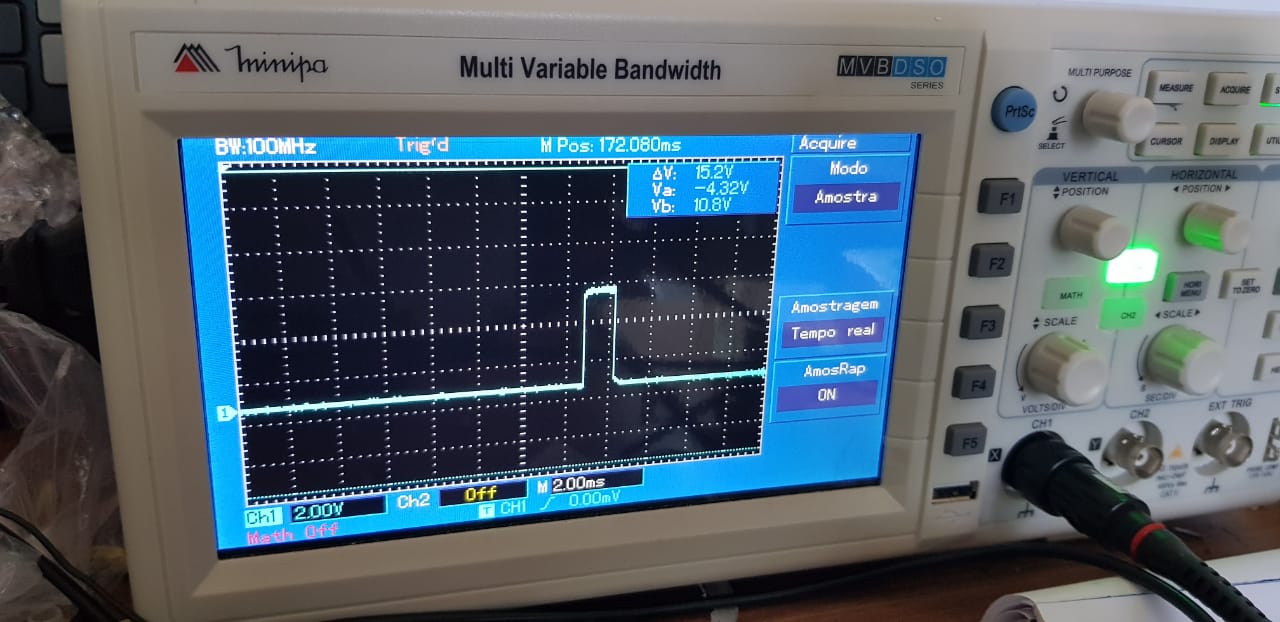
measure on oscilloscope the pwm signal is OK
but I can’t make the engine move
motor

Motor Brushless Keda 49-64 330kv
encoder

Encoder Rotativo Incremental 600 Pulsos/volta Eixo 6mm 5-24v
I’ve read the documentation several times but unfortunately I’m not able to advance I ask for help
could it be the frequency of pwm?