Hello everyone.
I have 2 hoverboard wheels. ( just wheel not motherboard or driver-card)

These 2 wheels have a 6.5" ratio. and it gives 90 encoder error when it takes 1 turn/revolation. (there are hall sensors inside the wheel)
I want to make a differential drive robot using these 2 wheels and using ROS.
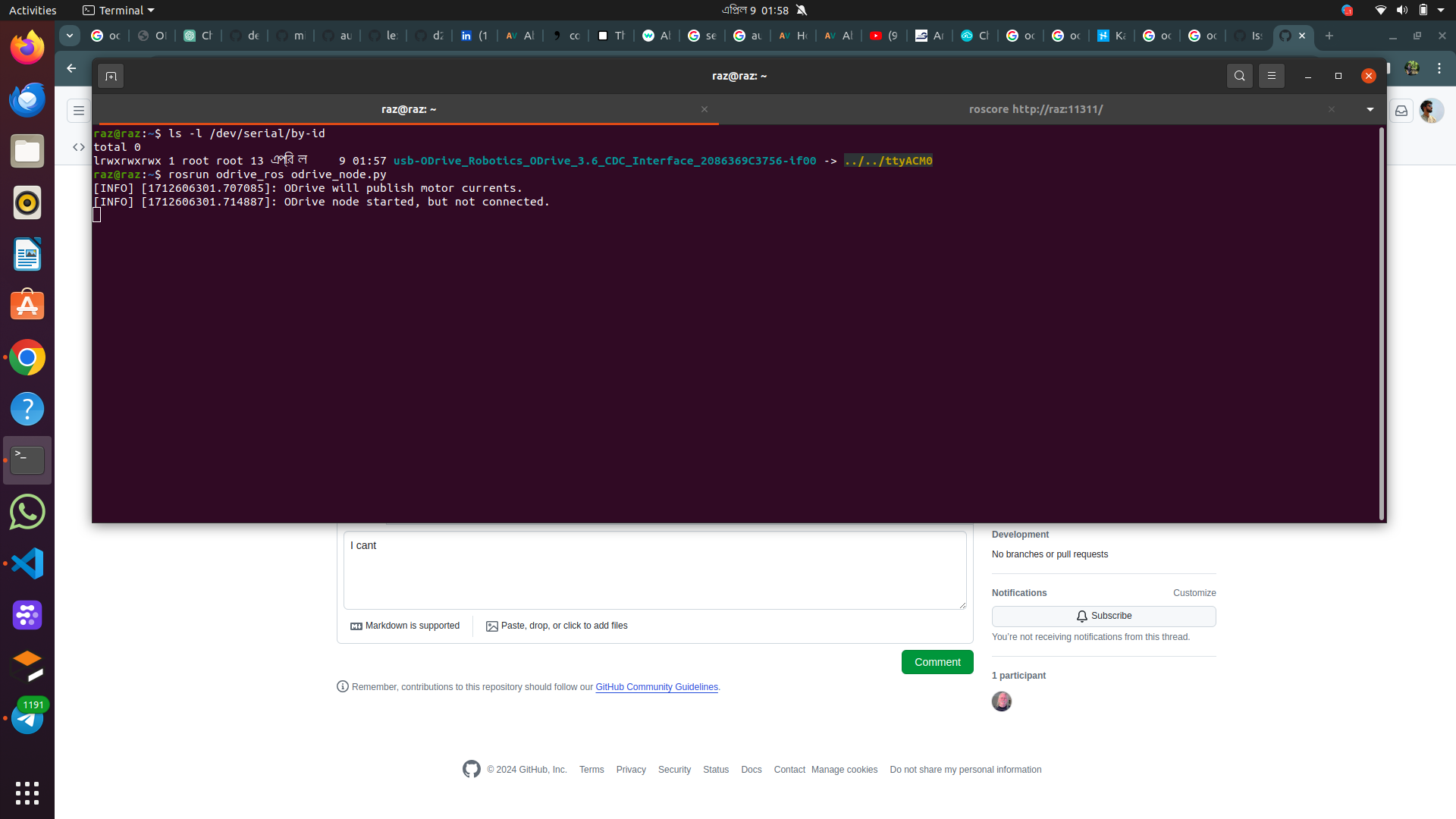
I’ve been searching for a long time and found the ODrive driver card. But how do I establish the connection between ODrive and ROS? Is a plug and play system possible?
Do you have friends who have made autonomous robots using ODrive and these wheels?
I’ve found examples on github, and I’ve been reading the comments, but I don’t quite understand. Some say it won’t work.
If there are friends among us who have succeeded and used this before and if you are reading this topic. Could you please contact me?
I really need this.