I have an old ~7Kg robot that’s max speed is ~27mph. I want to make a new robot ~10Kg that goes around 30mph and I know I need around 1000 RPM to achieve this.
I tried in vain for a while to effectively choose a motor that will give me the most torque at a certain RPM but I only know how to do this via Torque/Speed curves. Since BLDCs do not provide Stall Torque values ever, how can I do this?
The ODrive Motor Guide creates a set of benchmarks of an example load torque, but I do not know what torque my robot will require. I just want to know what motor will give the most torque safely at 1000 RPM to the wheels.
(Question 1) I know I need the max speed around 1000 RPM, acceleration can be slow like 5 seconds maybe? ideally transmission ratio less than 3:1 using different teeth sprockets only. How do I know which motor is the most powerful for around $100?
(guess 1) Easy way out? Pick a low Kv like 130, and choose the one with the highest rated power.
(guess 2) Or I can chose based on MaxCurrent * Torque Constant for highest Torque.
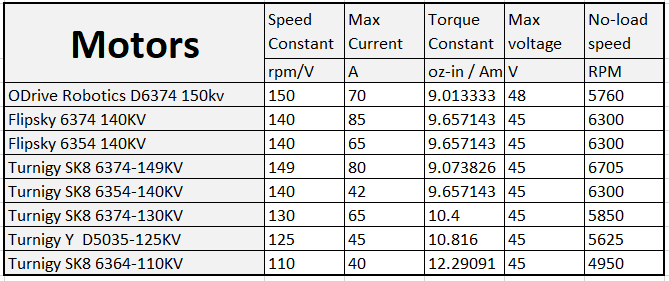
Motors I am looking at, with some math I may have messed up.
(Question 2) Let’s say I go with Turnigy D5035-125KV (Side Note: What does the D stand for and why is 5035 incorrect with its dimensions?). How do I know how to properly gear this motor? My only guess is to choose a No-Load speed after gearing that is 20% higher than my desired speed.
Last Note: My robot is weird… I use Whegs not wheels which will probably strain the encoder and BLDC. So the torque graphs will be very bumpy. That is why I want a high torque motor. I’ll be getting AMT103 for encoding. Any tips here?
To anyone who actually read my full post, Thanks so much! and any help will be greatly appreciated.
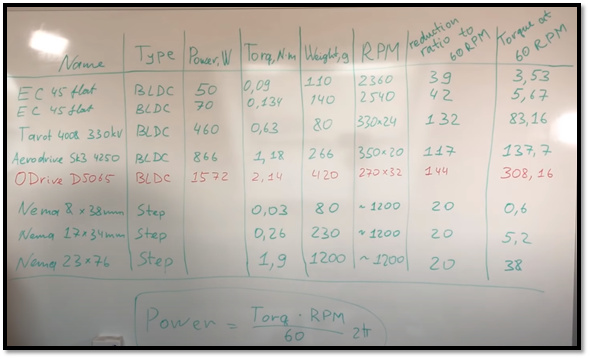
Update: I found a very useful video from YouTube by Skyentific
I really like how he compares motors at the same RPM, but I am unable to follow how he populated the power column as well as some other values he put:
He seems to use given max current as stall current. Are these the same? I thought manufacturers such as Turnigy mean max ‘Continuous’ current when they say max current.
He also has a power formula at the bottom, which I’m not sure he even uses?
Max power is roughly max current * max voltage for the motor. That’s a peak rating though, not continuous. Hobby motors don’t generally give ratings for continuous power.
Interesting, I’ve been getting mixed answers on this all over the community. It makes sense why they would want to put the higher value, but I’d love to find someone who actually tested this at home on their own rig.
There’s many answers on this forum, i recommend a search. Some people have taken temperature measurements while running the motors and plotted it out all purdy
@Socka I made a writeup here on the derating curve for hobby motors. From all my testing I’ve found this to be accurate. Pushing beyond 30% rated power without active cooling leads to thermal runaway effects. @Richard_Parsons has also done some great work in more detail. Worth checking out his posts.
I did not understand that derating curve the first time I looked but now I see. It answers a lot of questions I had!
(1) I bought two APS 100Kv motors which have a max current of 80amps, so according to your post I should only give about 25-30 amps (Unless I get a fan on the motor, for up to 40 or so amps?)
(2) Since I will be running two of those motors from a single ODrive, I will certainly need cooling on the driver itself right? I saw the post on the continuous current for the ODrive, but they only used one channel. Does the cooling needed increase when you use both channels?
Sorry for the delayed response, and thank you so much for your time.
-Socka
@Alexander_Jones Thank you very much for your response! I purchased my own fans, and I really like the turbo-style ones you chose as they can better direct the air flow . Got myself 12v versions
Maybe for the motors I’ll just go with the regular PC fan style.

 I know I need the max speed around 1000 RPM, acceleration can be slow like 5 seconds maybe? ideally transmission ratio less than 3:1 using different teeth sprockets only. How do I know which motor is the most powerful for around $100?
I know I need the max speed around 1000 RPM, acceleration can be slow like 5 seconds maybe? ideally transmission ratio less than 3:1 using different teeth sprockets only. How do I know which motor is the most powerful for around $100?