In [15]: dump_errors(odrv0)
system: not found
axis0
axis: Error(s):
UNKNOWN ERROR: 0x00000100
motor: no error
sensorless_estimator: no error
encoder: Error(s):
ENCODER_ERROR_ABS_SPI_COM_FAIL
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
I try to get the value of AS5048A in ardunio, and I did.
What happens if you do a dump_errors(odrv0) right after save_configuration() and reboot(), without even attempting the calibration sequence?
I’ve run into the same issue with the same encoder, but with hoverboard motors, and I always got ENCODER_ERROR_ABS_SPI_COM_FAIL already after saving configuration and rebooting.
Hello! I faced the same problem. Just soldered 4.3K resistor between 4 pin and AVDD. Still have ENCODER_ERROR_ABS_SPI_COM_FAIL error after reboot. If i disconnect CS pin from the working device and connect it again encoder(AS5048A) starts working, but during full calibration it goes offline again
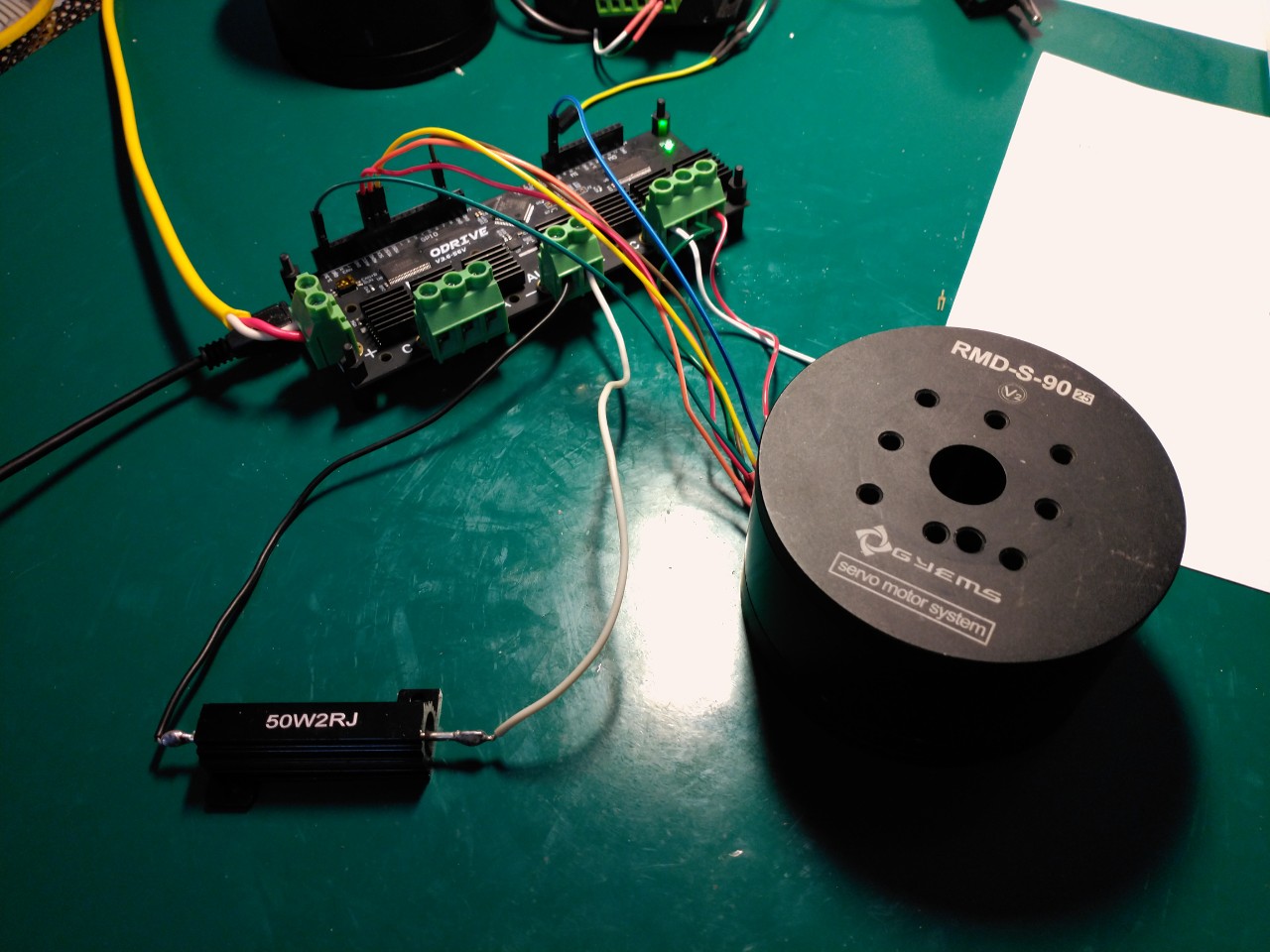
@nghiank97 unrelated to the topic, but I just registered and can’t send a direct message. Could you explain your photo a little bit please? I understand that the motor on your picture is RMD-S with a built in controller board.
Do you somehow compliment that controller with ODrive, or do you bypass the built in driver completely and control BLDC part of that motor with ODrive directly?