OK, some progress, I think??
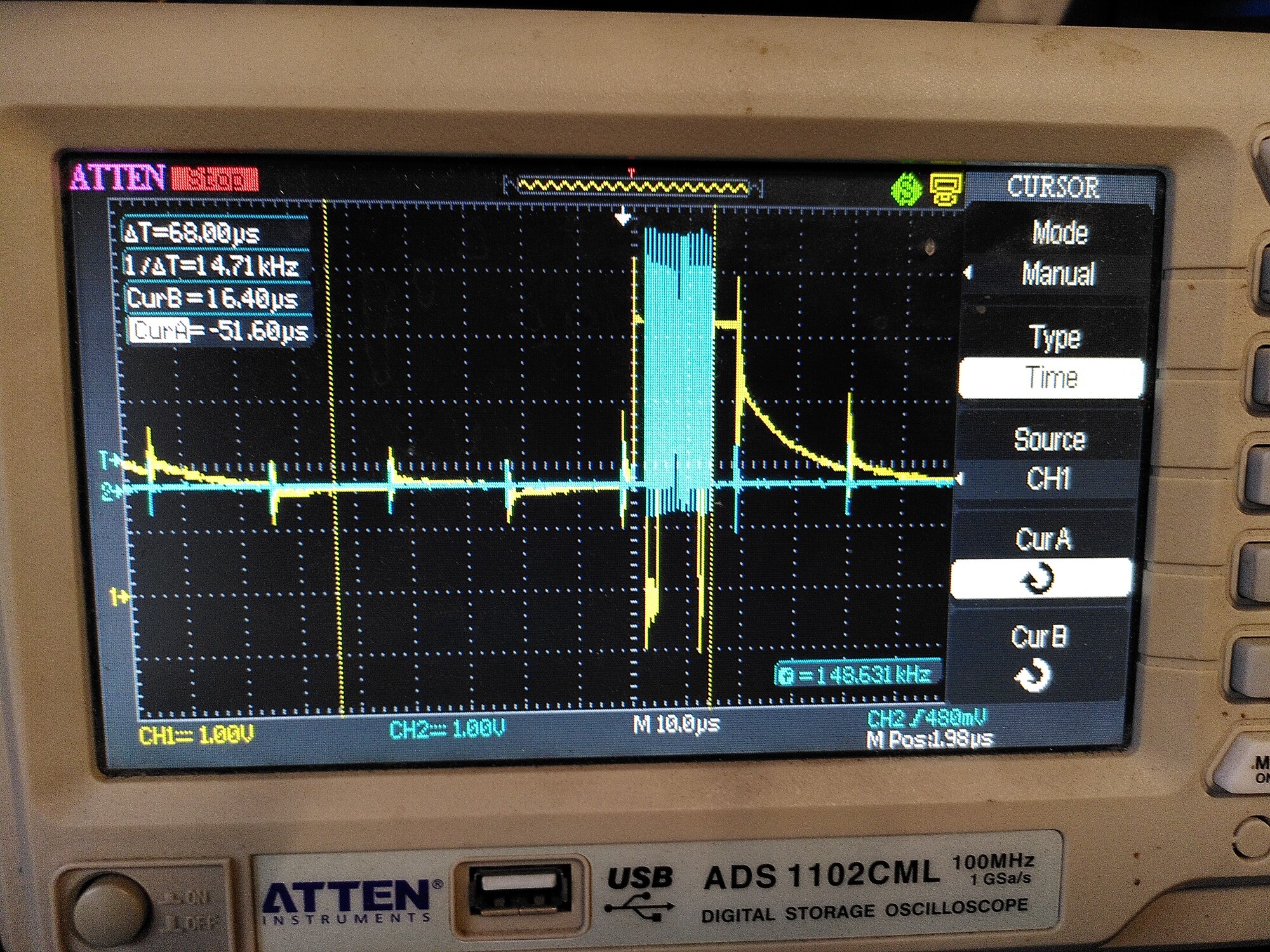
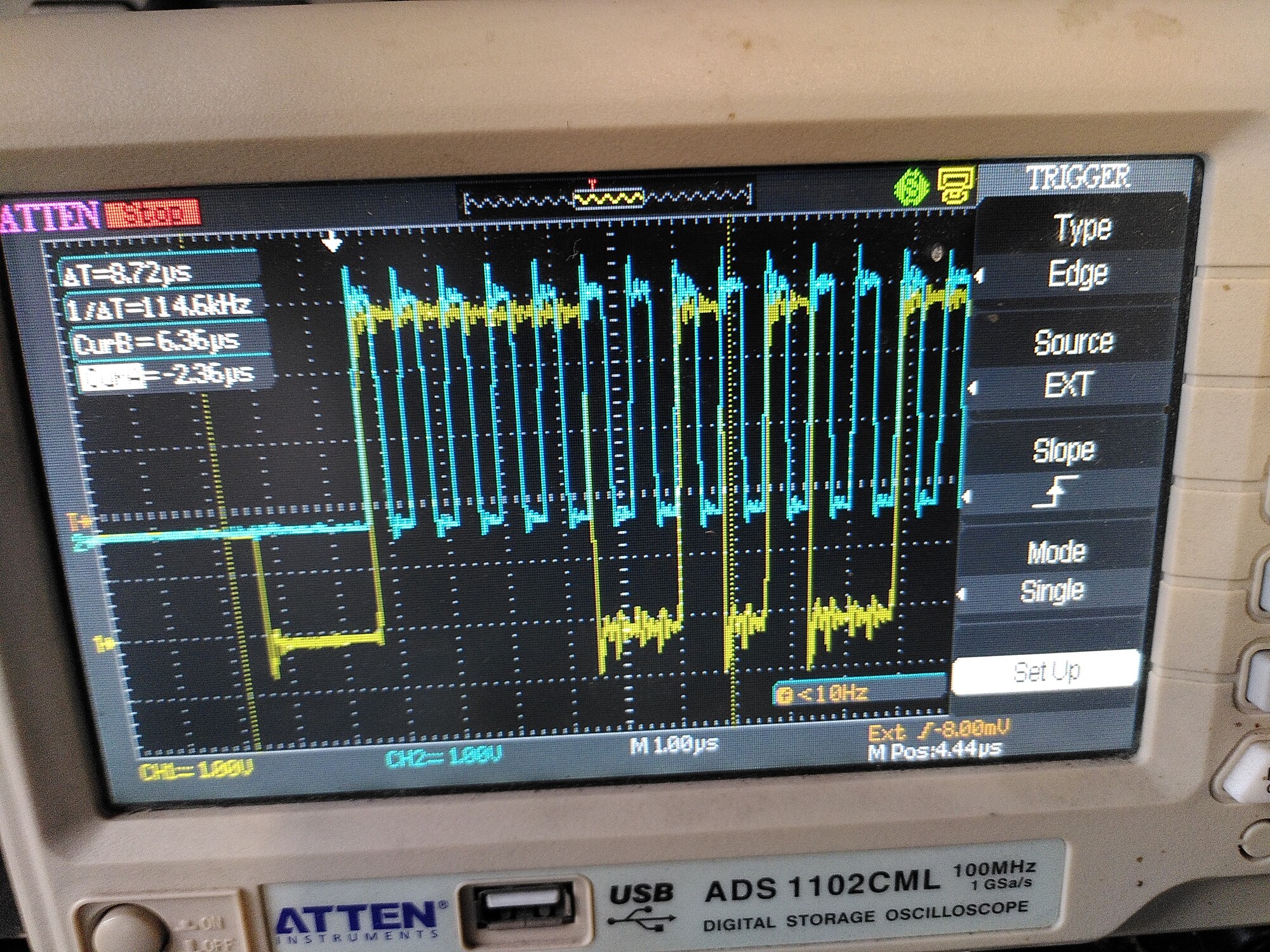
I went back to my scope, and I noticed that I was getting those bogus SPI transitions. The scope was ficking between two traces:
&
.
I remembered about the 50R resistor. I didn’t have 50R to hand but I used 100R, and put it in what I thought was the SCK wire. Actually it was MISO.
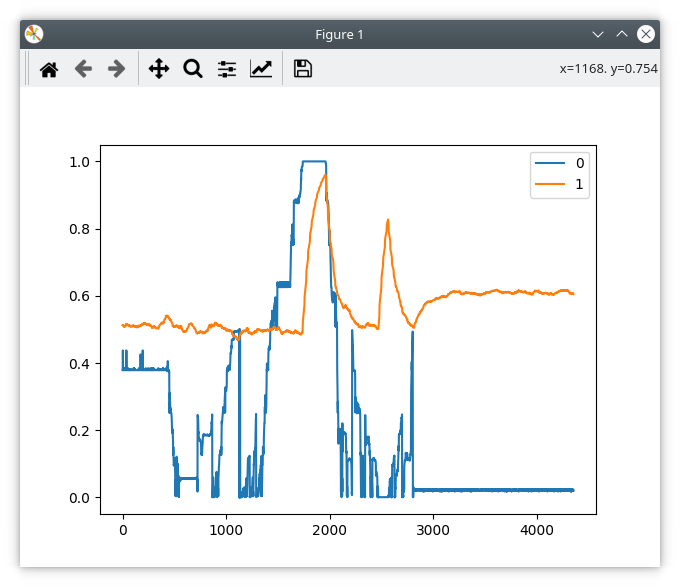
That made a big difference. The position looks good now, although SPI_error_rate is still hanging around 0.5, in all positions.
Then I thought OK, i’ll do the other wires, which is when I noticed my error.
So I put a resistor in line with SCK, and left the one I put in MISO.
That made things worse. 
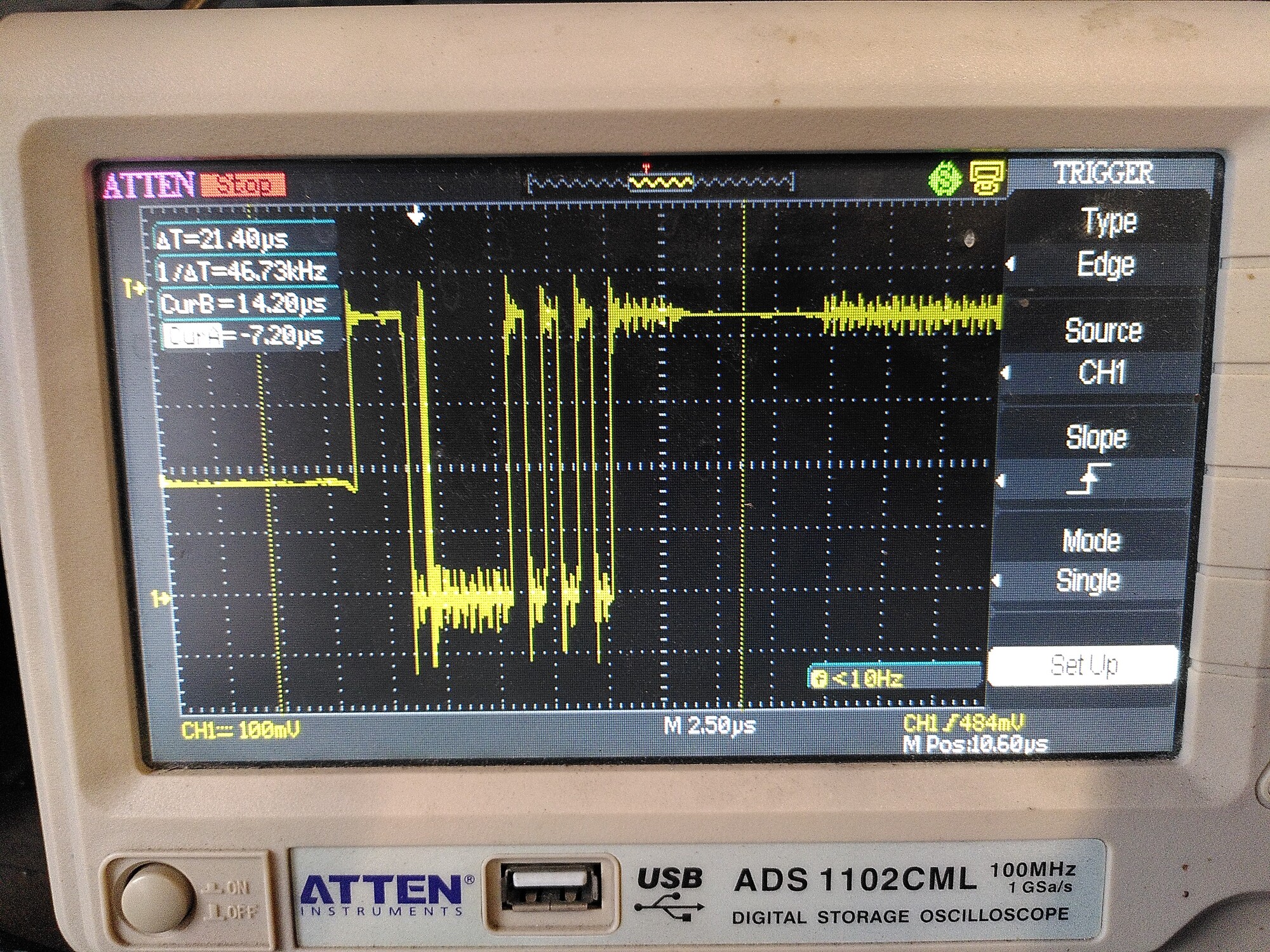
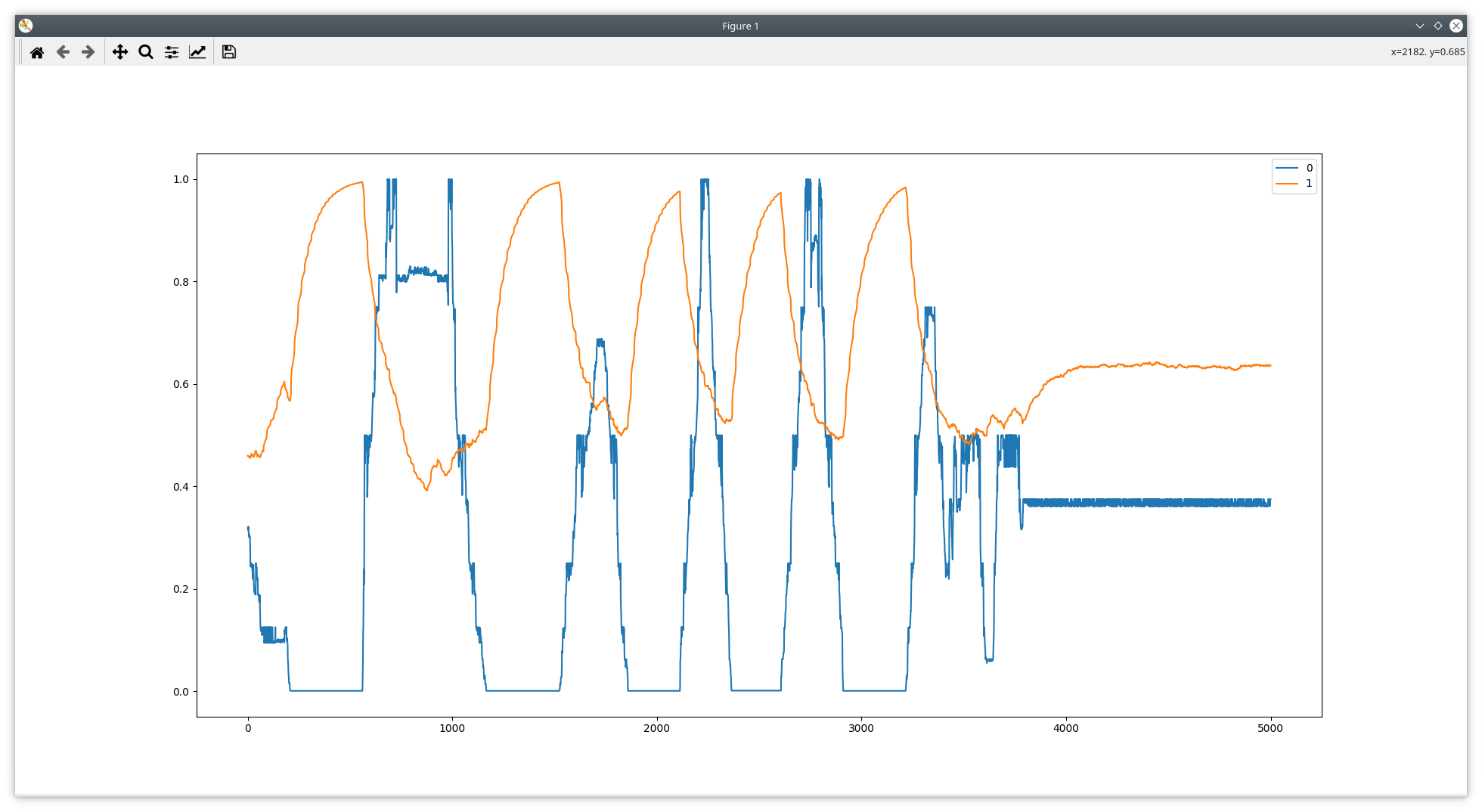
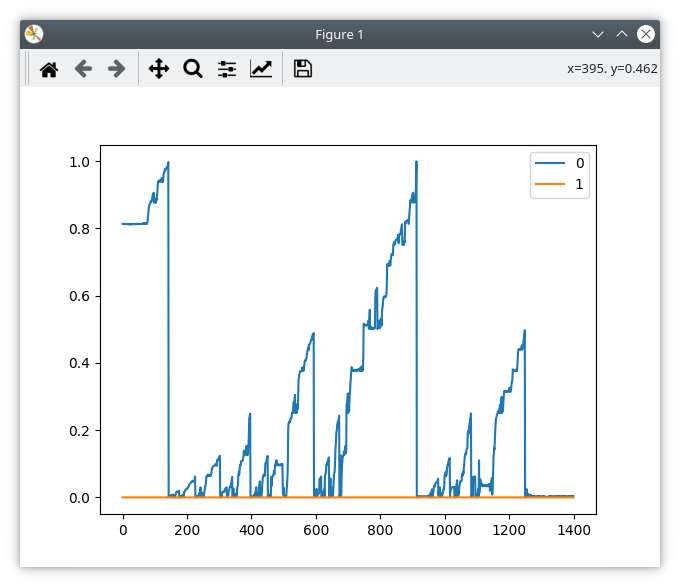
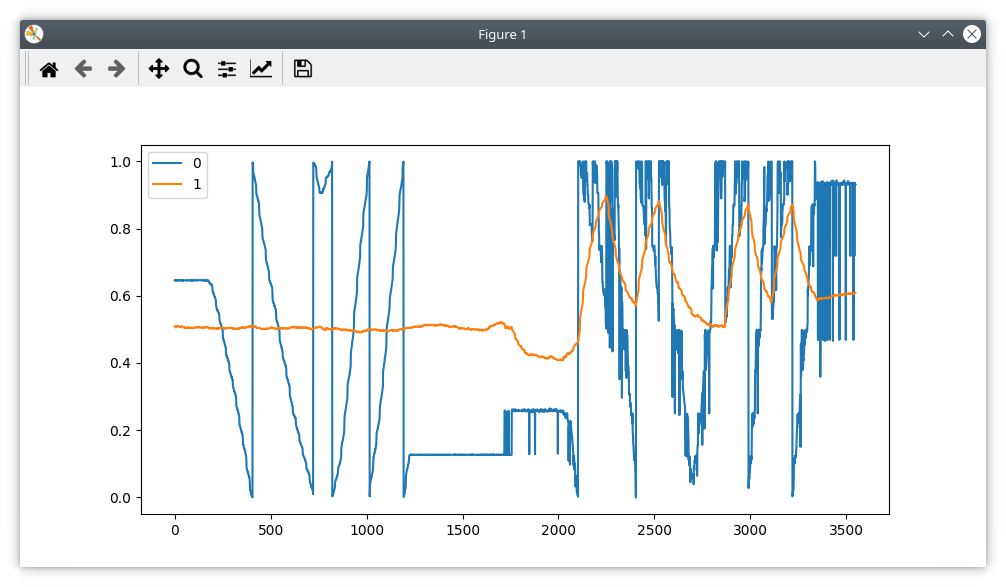
To illustrate, the plot below is with 100R in line with MISO on the left (the resistor on SCK is shorted out). The right part is where I remove the short, and put 100R in line with SCK.
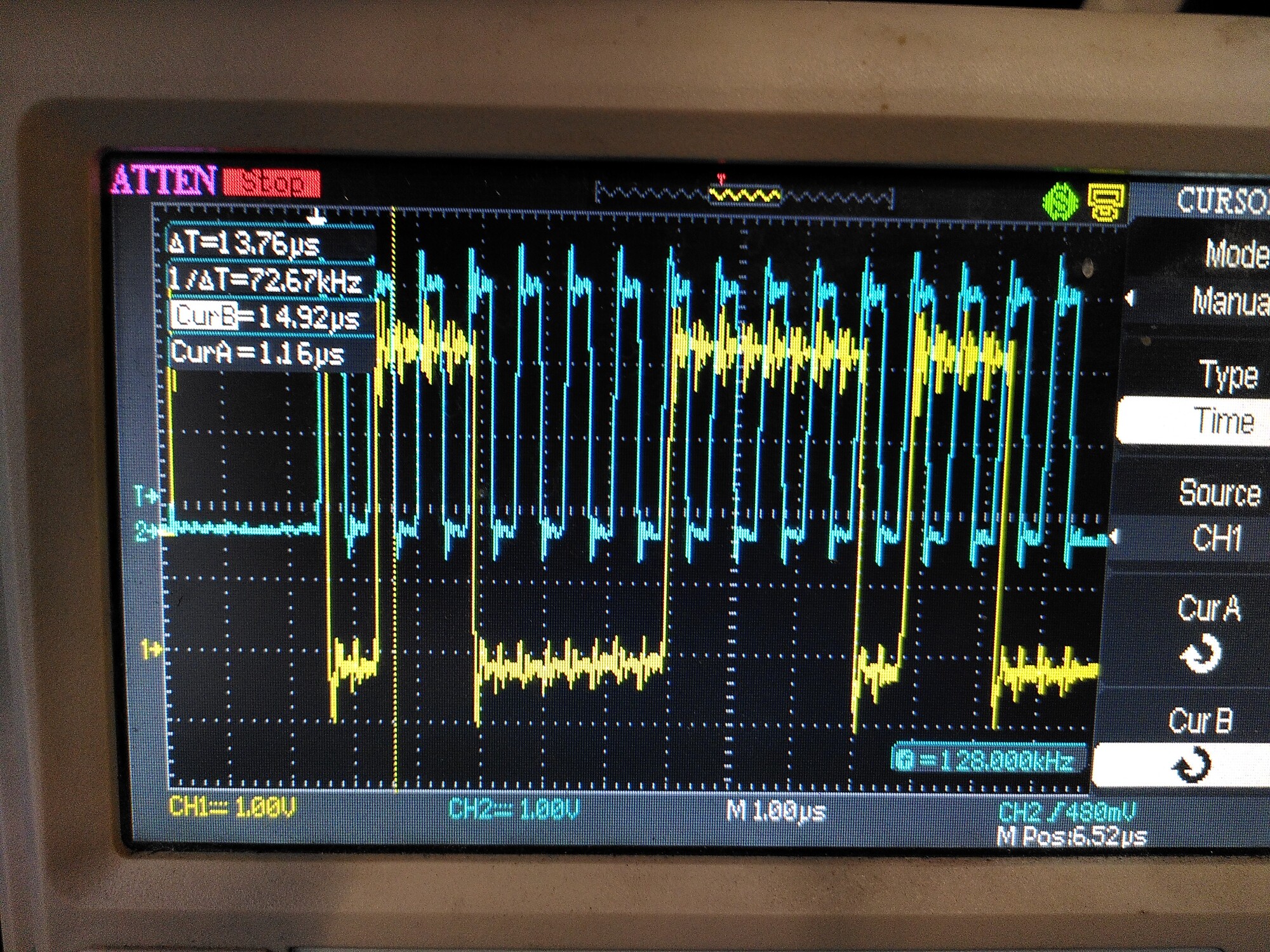
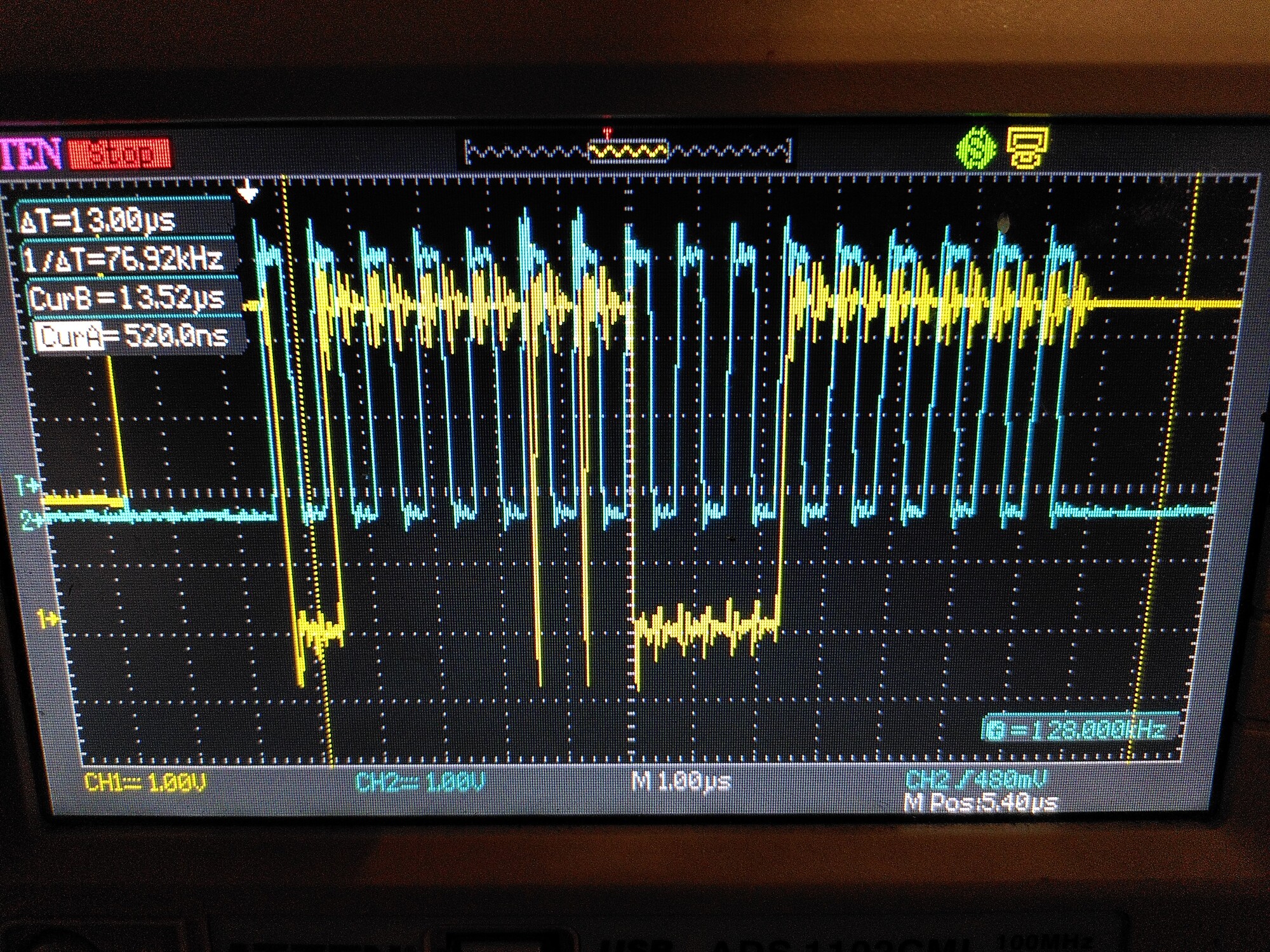
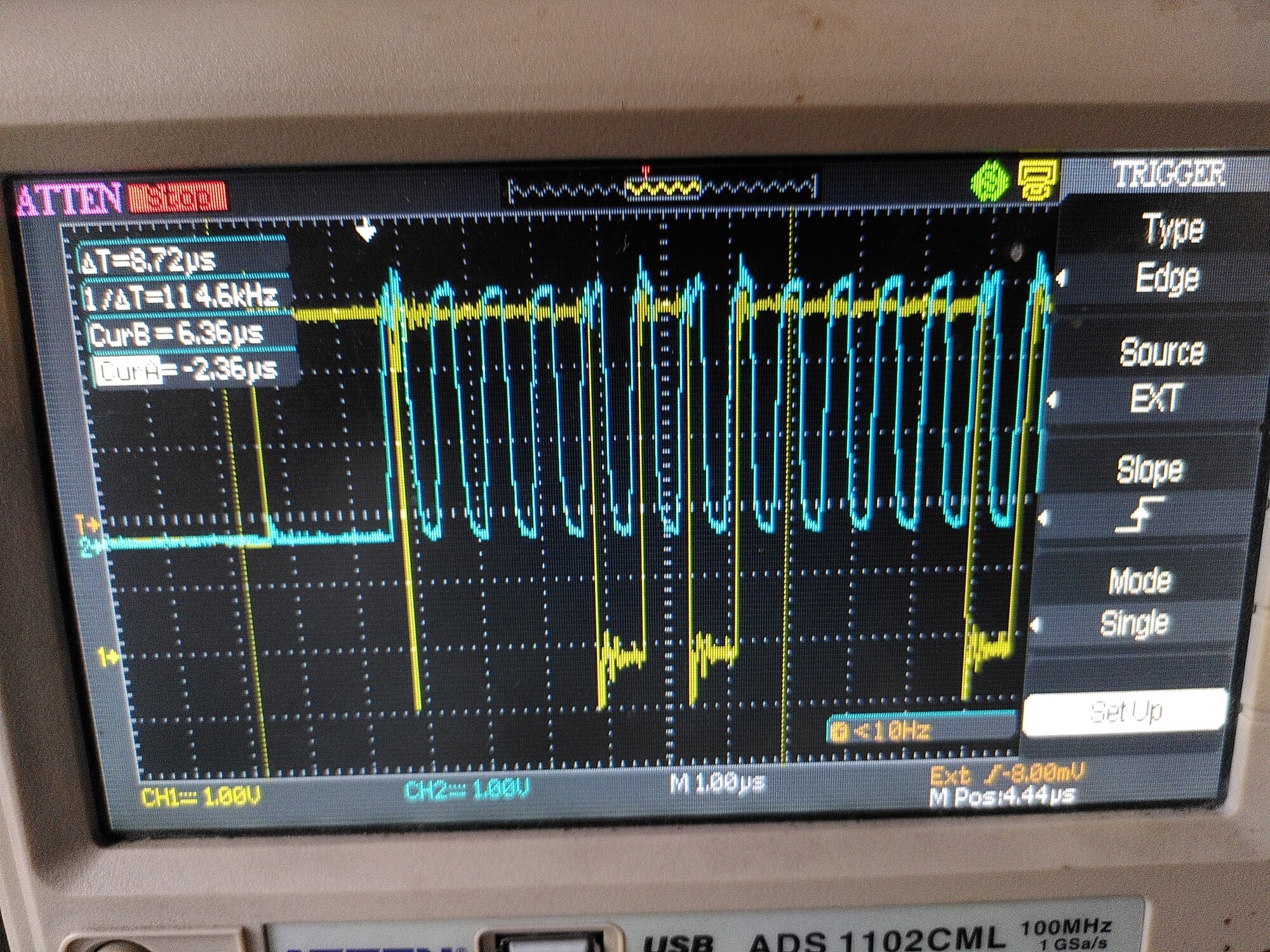
Interestingly, I can see the difference on the scope.
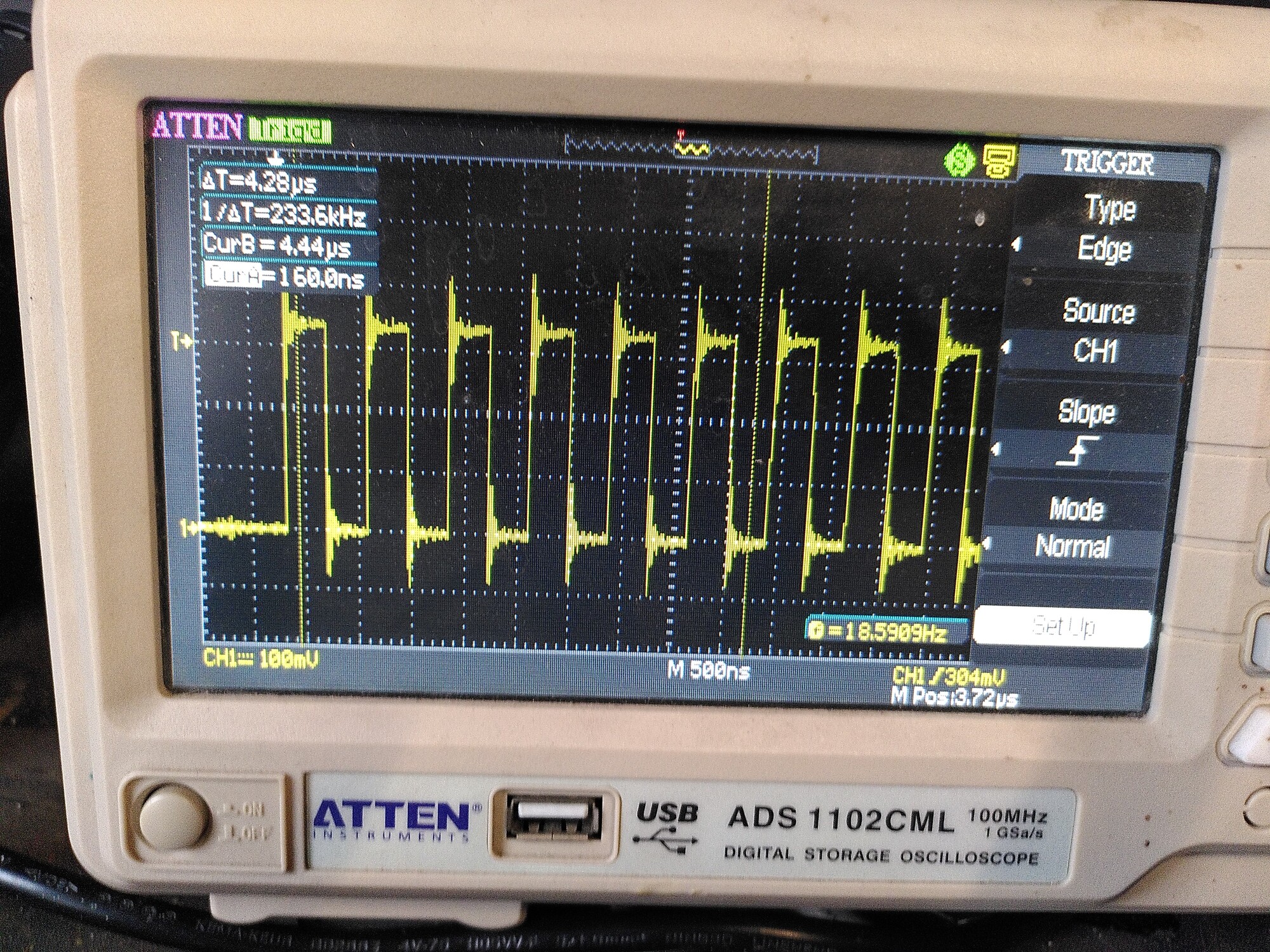
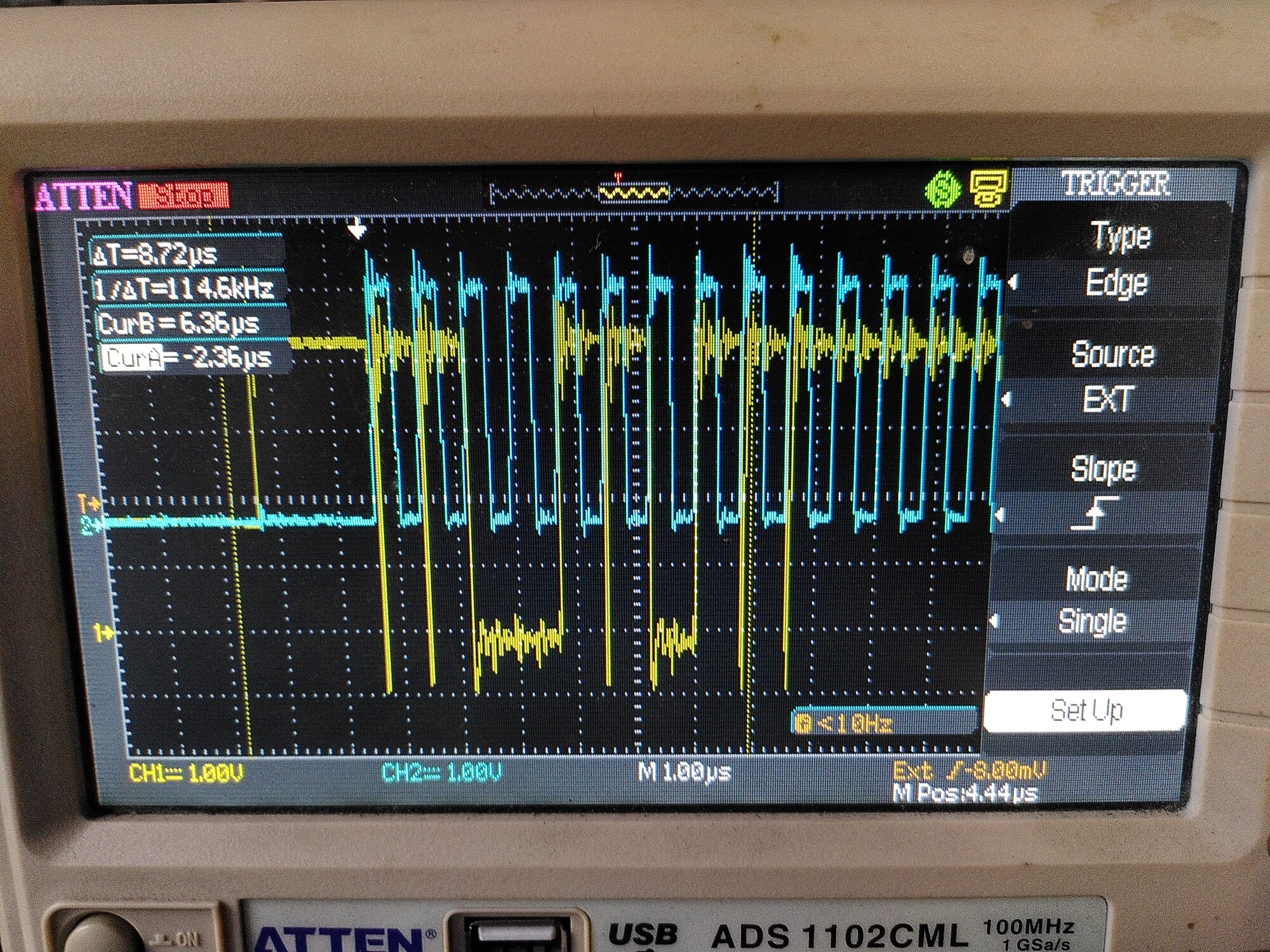
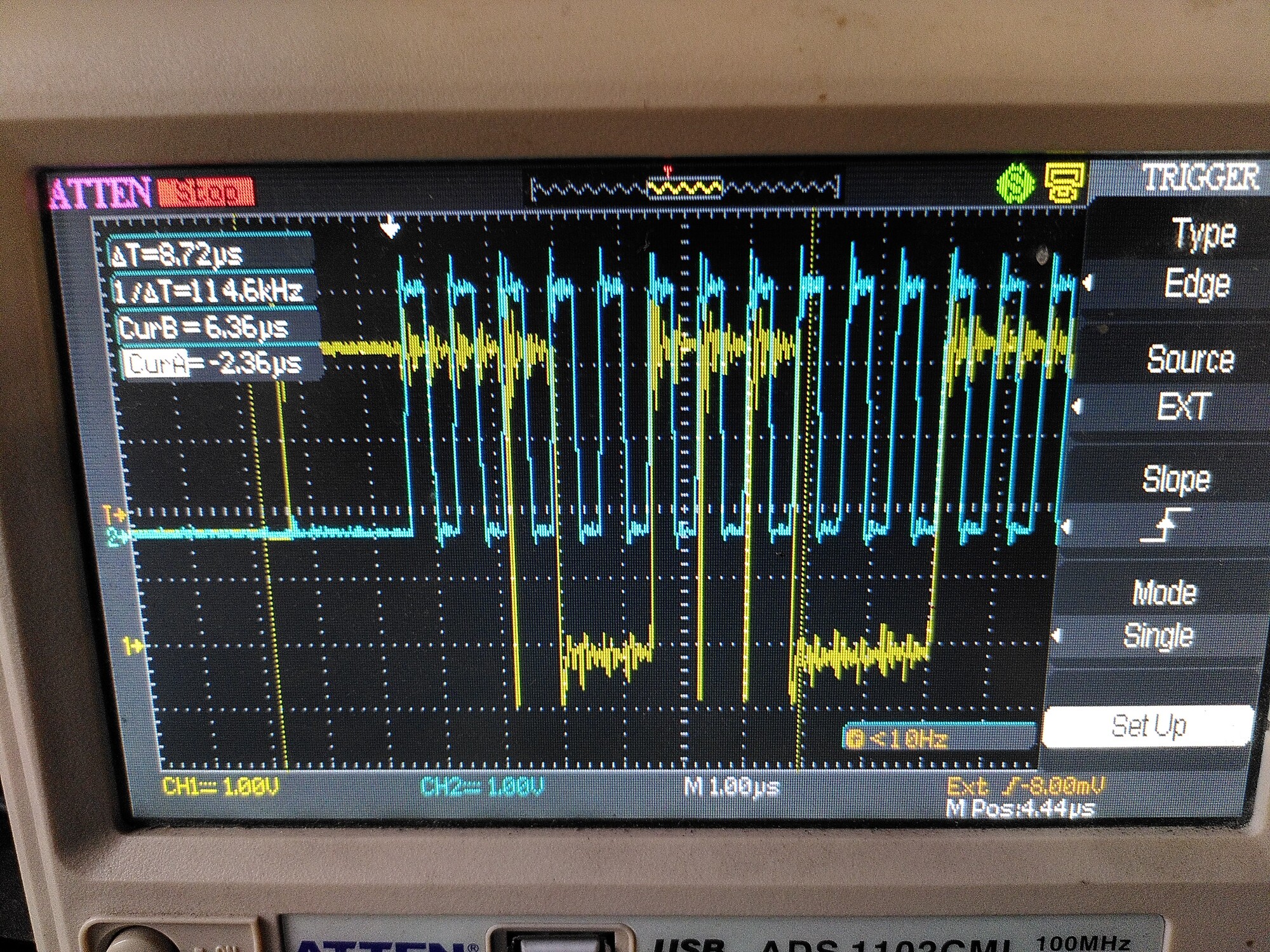
The first trace is with 100R in line with MISO (in yellow, but the probe is on the encoder side of the resistor) and no resistor on the clock (because it’s shorted out).
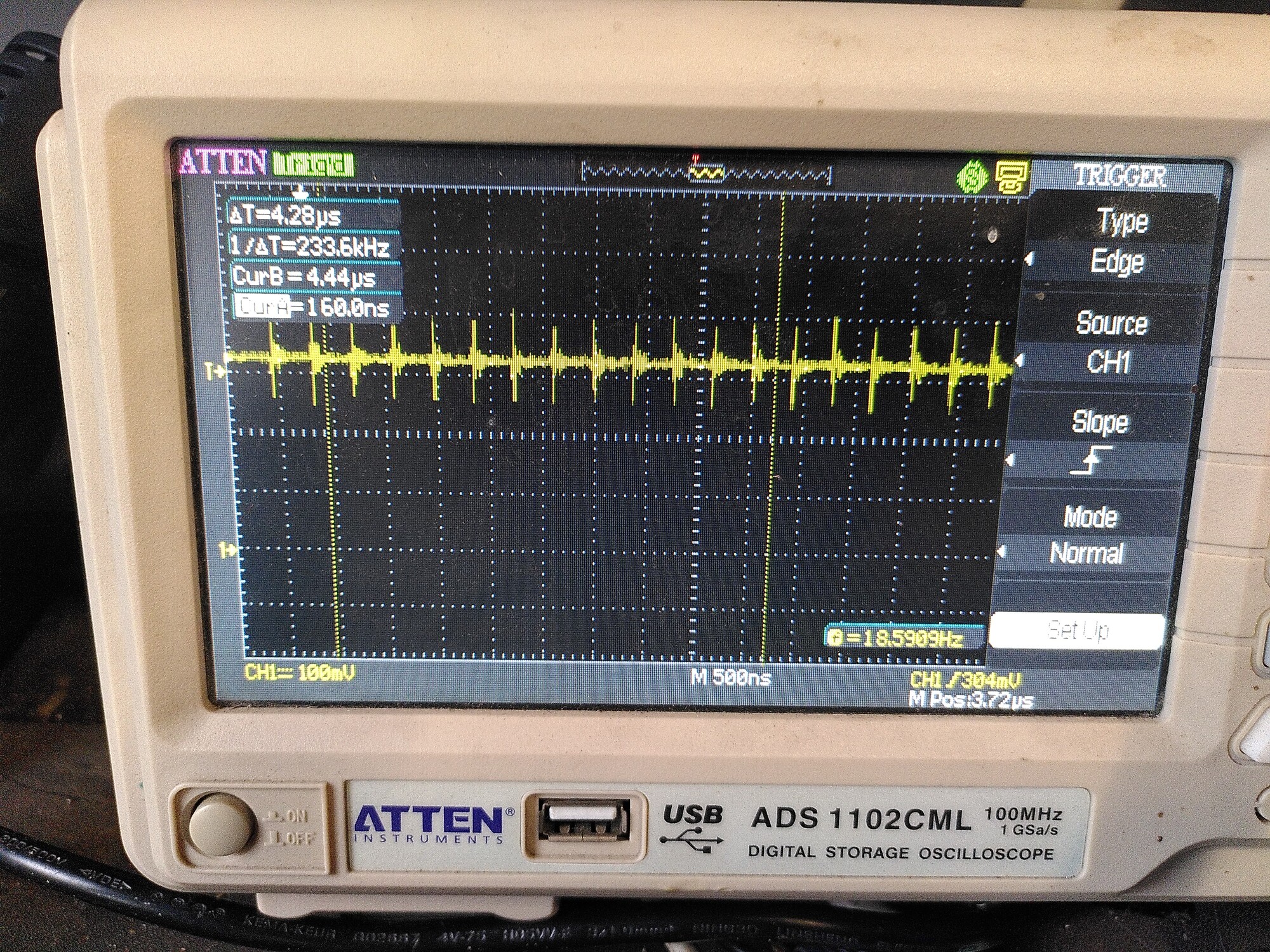
The other two are with the short removed, so 100R on the clock too.
You can see those weird transients appearing on the second and third trace.
Ill see if I can get hold of some of the recommended 50R and get back to you. 
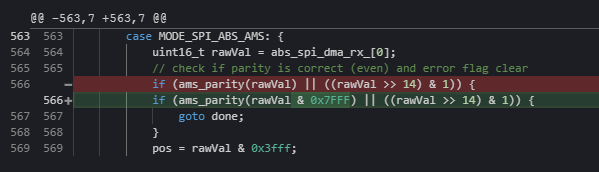
And no, I don’t think it was anything you did in the code that caused this - i’m pretty sure it still happens on your old RazorsEdge branch which is what I was using in 2019. It’s probably definitely maybe a SPI issue. But Why the pitch-forking hell is it happening now, when I had no issues whatsoever in 2019-2020 until they all slowly started to degrade to this state with no changes to hardware or software.
It’s as if these chips have all caught covid and died. 
EDIT: Ok last post for a bit. I found some 20R resistors. I put one in the SCK wire.
Again, it is worse than having no resistor…
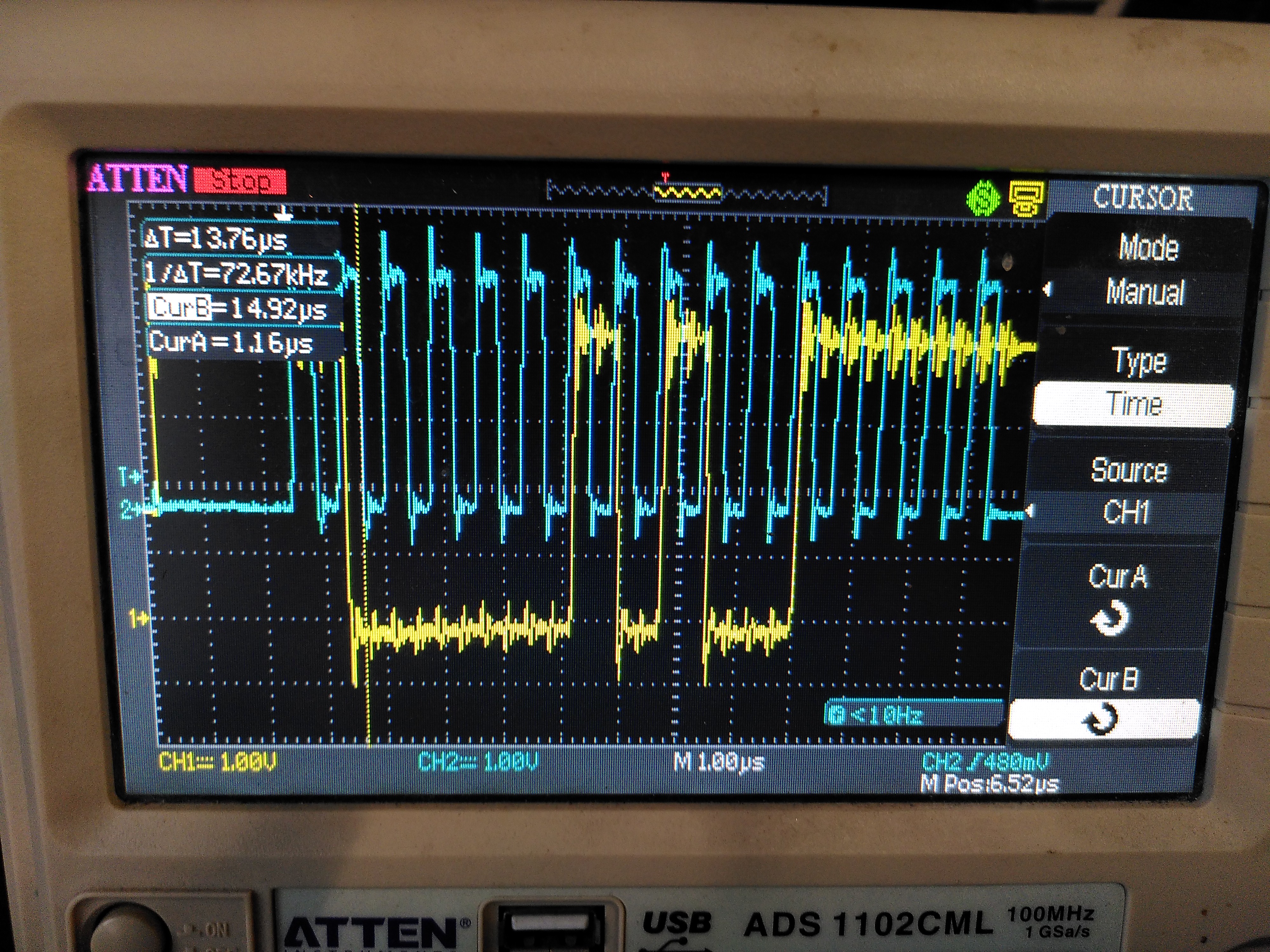
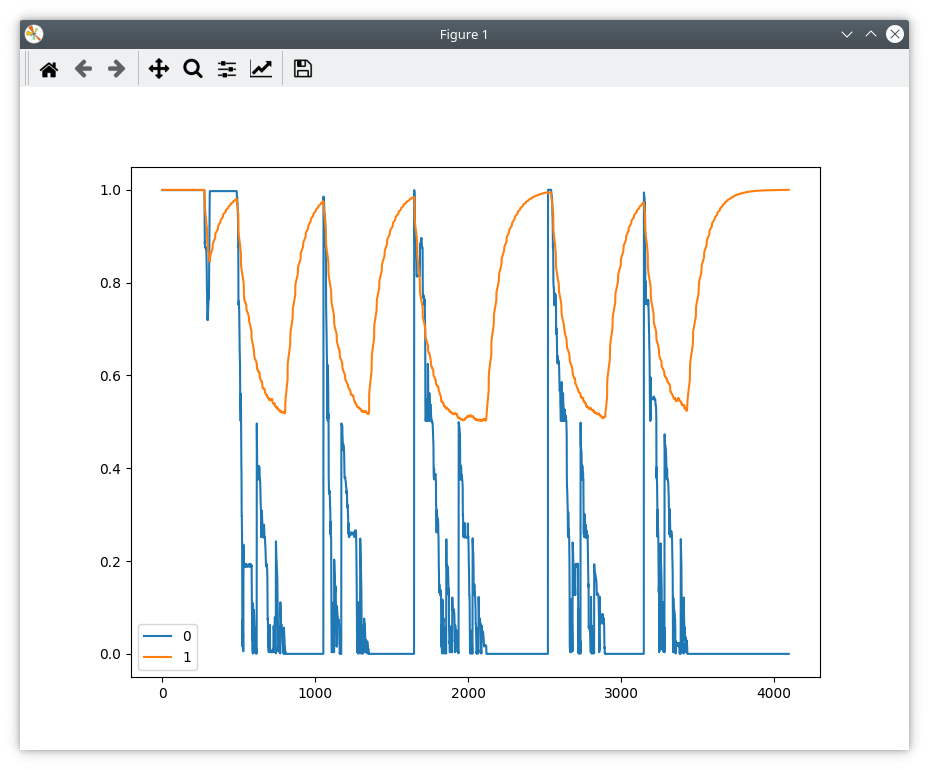
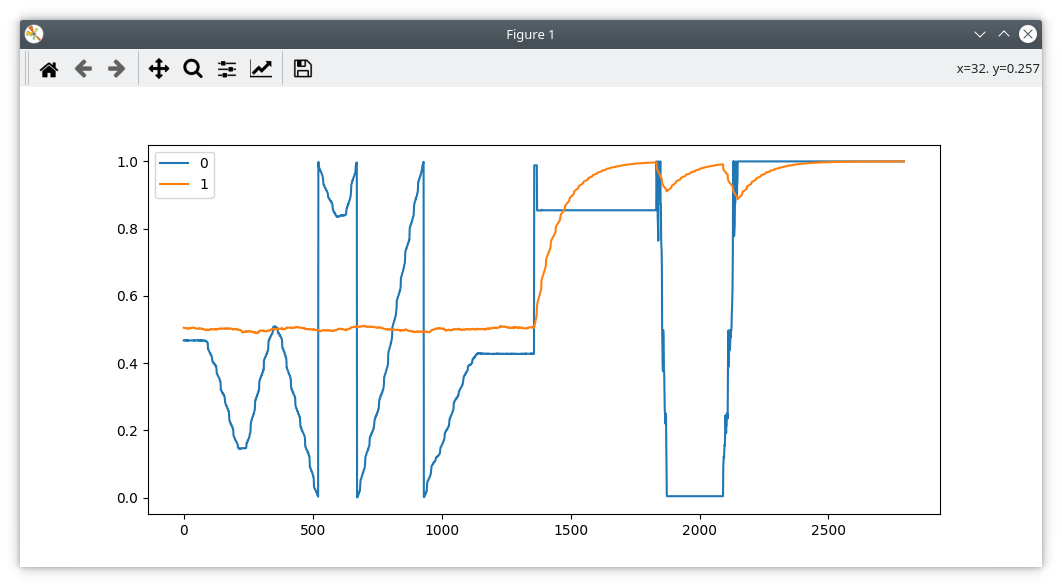
Graph to illustrate: I short out the resistor, move the motor by hand a few turns, then remove the short and repeat the same movement:
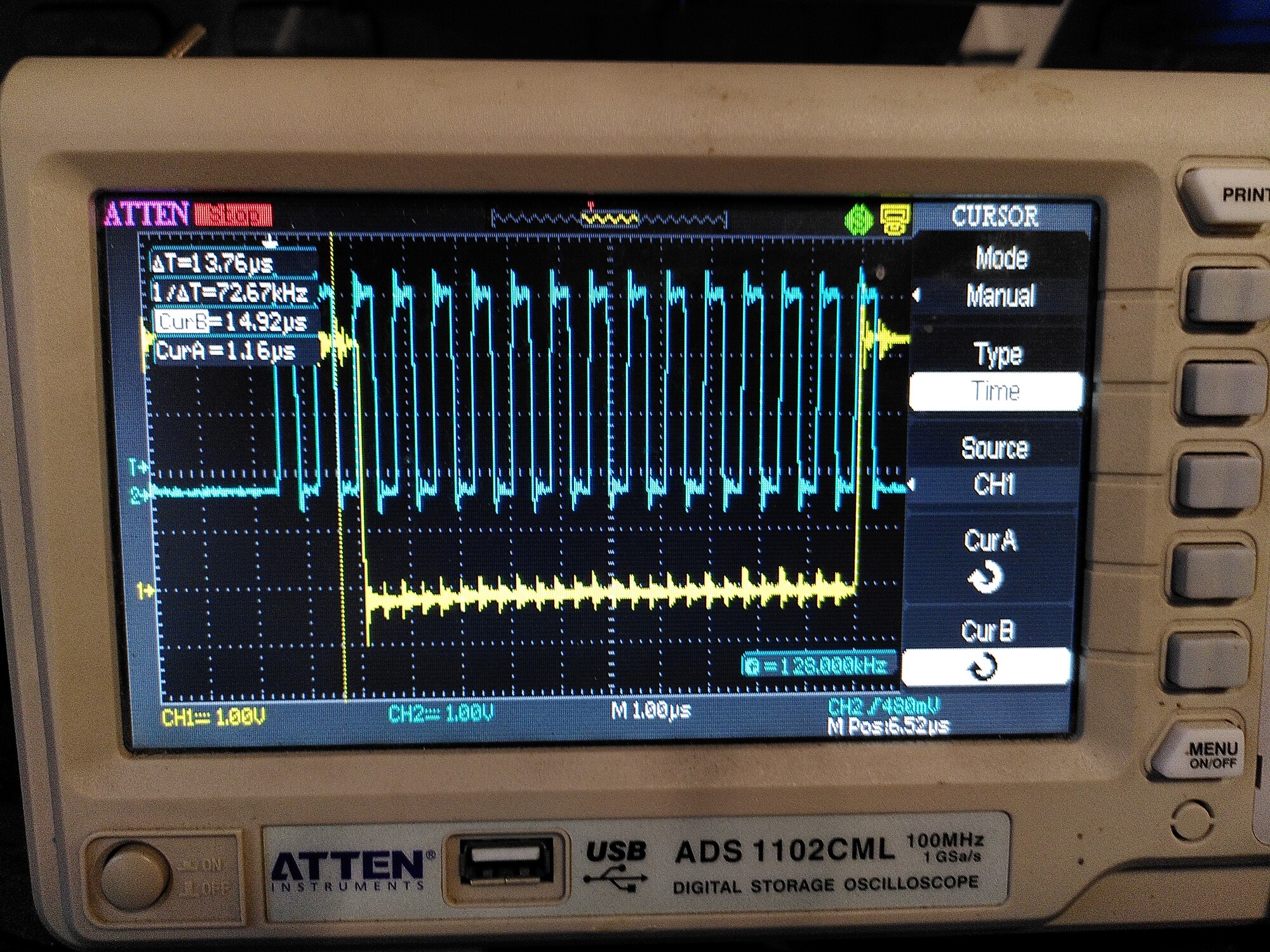
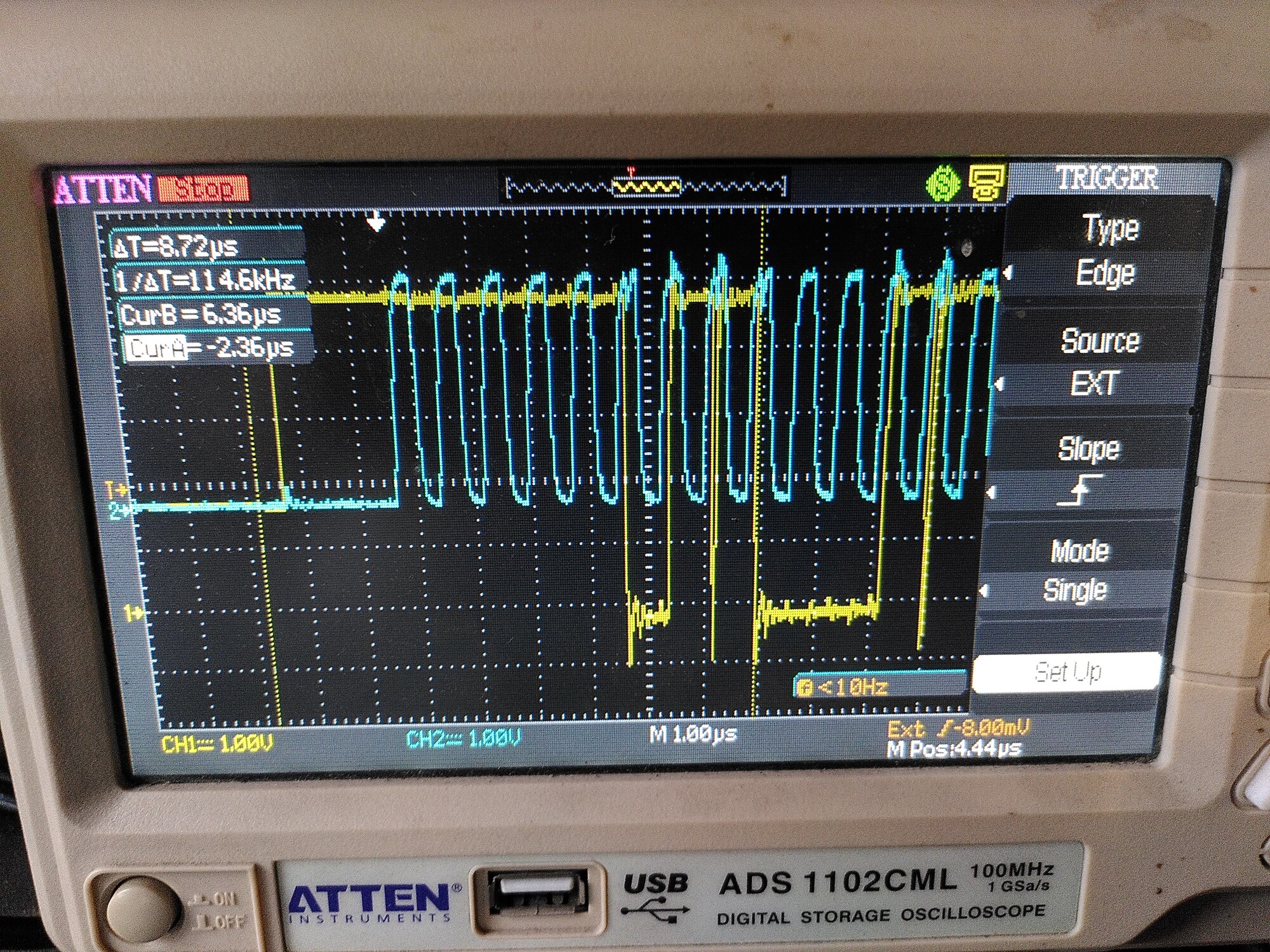
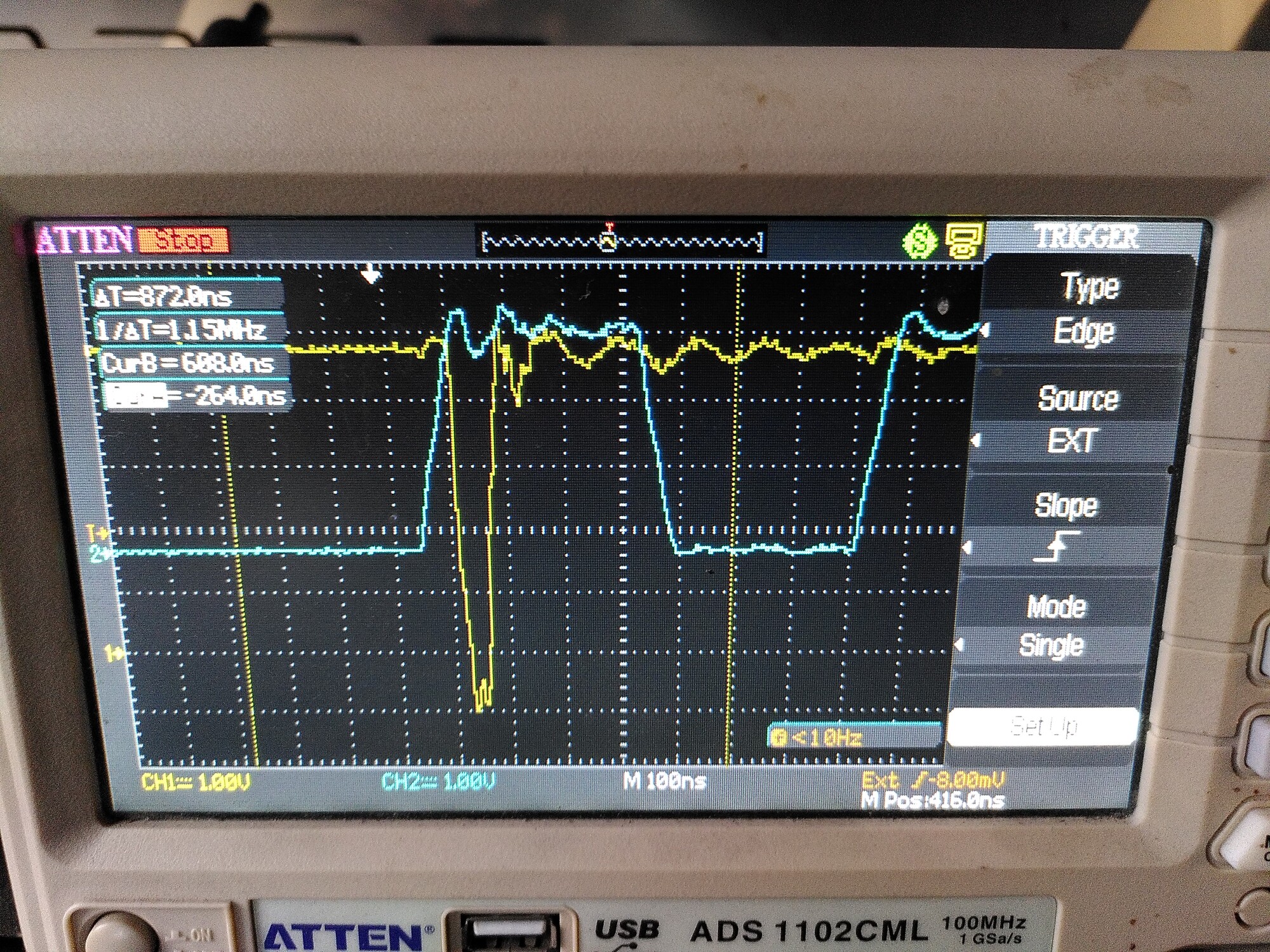
On the scope, I can see that the clock looks much cleaner, but there are those weird transients now present on MISO, like this:
(Blue is the clock. MISO should never change state at a higher rate than the clock)
It must be seeing some noise and interpreting it as a clock edge. But the probe is on the encoder side - there is hardly anything there to cause that.