Hi, new here. I am working on using a odrive board as charge controller for a hydropower turbine . So my hoverboard motor is going to actually be a generator. I saw in other post that it “should” be safe to accidentally back power the odrive from the “motor” EMF as long as staying below 56V and not issuing any startup commands. I’ll do my best to always have the 48V battery connected, but comments appreciated.
My real question is how to enable regenerative breaking instead of brake resistor. I see it mentioned many places to be a supported feature, but don’t see the command?
Hmm…?
After setting the brake resistance to zero I can no longer set velocity. I have regen current to 10A. Does it refer to motor current or Ibus?
Is there anything else I need to do? I have tried both dynamic and save/reboot of break res
I try to enter command odrv0.config.dc_bus_max_negative_current = 1
but get error: Attribute dc_bus_max_negative_current not found
So I may have got the syntax wrong…
dump_errors(odrv0)
axis0
axis: Error(s):
AXIS_ERROR_BRAKE_RESISTOR_DISARMED
AXIS_ERROR_MOTOR_DISARMED
motor: Error(s):
MOTOR_ERROR_DC_BUS_OVER_REGEN_CURRENT
fet_thermistor: no error
motor_thermistor: no error
encoder: no error
controller: no error
Can you briefly explain the interaction of these parameters and if my understanding is correct:
odrv0.axis0.motor.config.current_lim (M0 peak current in windings)
odrv0.config.max_regen_current (current from windings or ibus, DC or AC?)
odrv0.config.dc_max_negative_current (max DC current backfeeding into power supply)
Why do we need both “regen” and “negative” entries, one of them seem redundant?
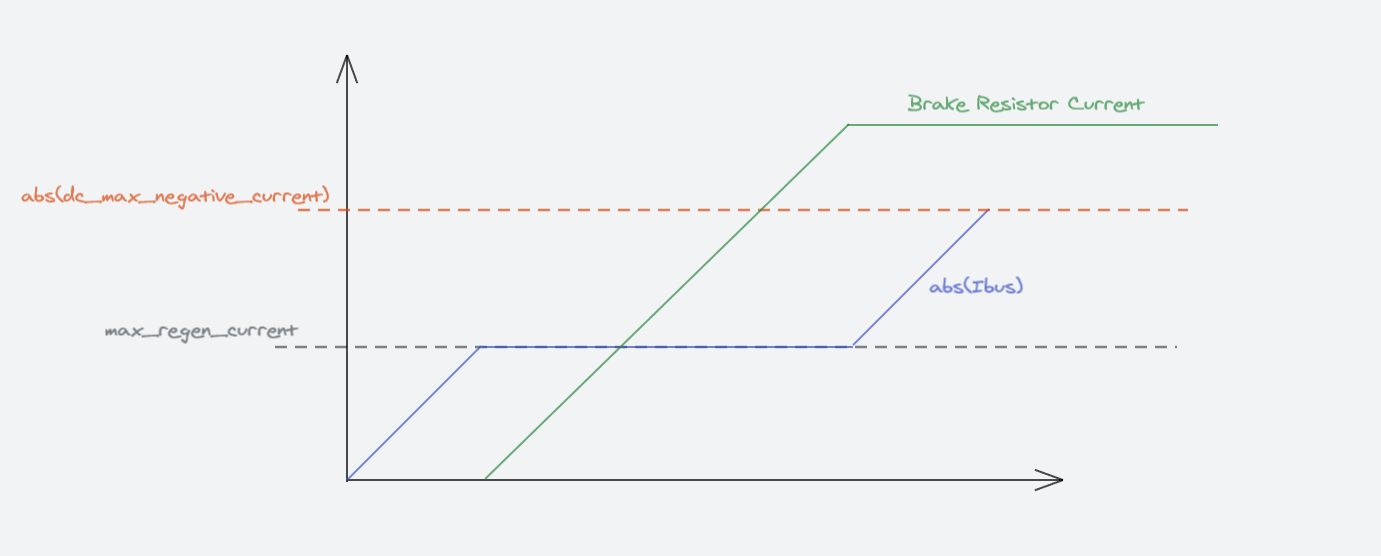
basically we don’t start running the brake resistor until we have at least max_regen_current being generated to the bus. And then if the brake resistor saturates, we allow up to dc_max_negative_current before we throw an error.
I’m not sure it’s a great system but it sorta makes sense lol