Hi,
I have a problem with encoder slippage with an AMT10 encoder mounted on a robot arm axis. The arm rotates around on a screw like this with the encoder adapter fixed on it (adapter not in the picture)
Here is a CAD picture of the arm with the encoder mounted on it:
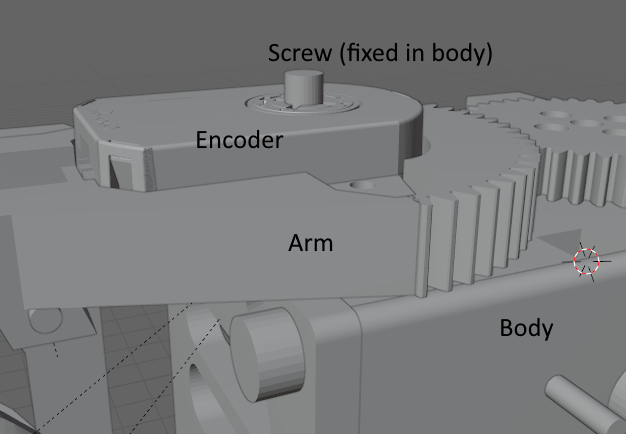
(Note that the screw head is on the outside, it’s just not modelled)
The screw is supposed to be fixed in the body, so that when the arm rotates, the encoder can measure the angle.
To make sure the arm can rotate freely, is has a bearing:
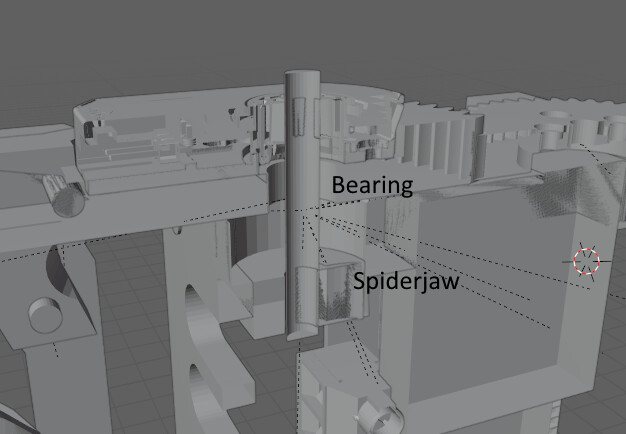
In order for this to work, the screw must be fixed in the body and must not rotate, but of course there must be a way to install it in the first place. To solve this, I tried to use one half of a spider jaw:

This is installed in the body and with an additional screw inside the spiderjaw, the axis screw can be tightened to prevent it from rotating.
Unfortunately this doesn’t work under extreme accelerations. The screw still rotates a bit then and screws up the angle measurement.
Does anyone have ideas on how to fix this?