Hi there,
I was wondering if anyone could bounce any ideas around the issue that I have.
I am running v3.6 56V and two D6374 150KV with 8192 CPR encoders. The firmware and odrivetool are both 0.5.1.
These are the settings that I have changed from the default:
odrv0.config.brake_resistance = 1 // bespoke resistor bank, load with fairly high inertia
odrv0.axis0.motor.config.current_lim = 35
odrv0.axis1.motor.config.current_lim = 35
odrv0.axis0.motor.config.torque_constant = 1
odrv0.axis1.motor.config.torque_constant = 1
odrv0.axis0.controller.config.vel_limit = 100
odrv0.axis1.controller.config.vel_limit = 100
odrv0.axis0.controller.config.vel_gain = 2.5
odrv0.axis1.controller.config.vel_gain = 2.5
The problem:
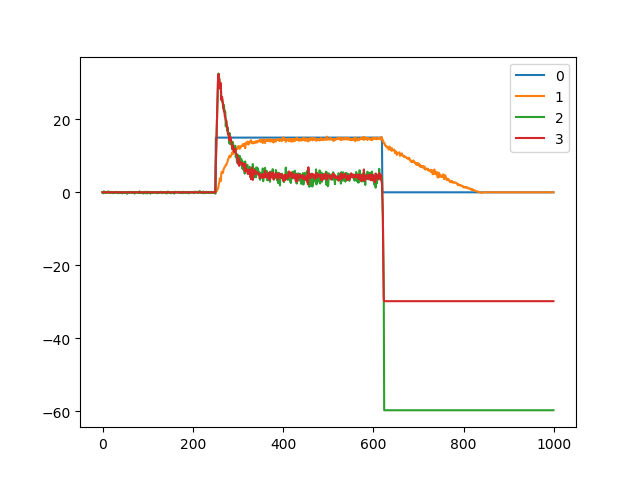
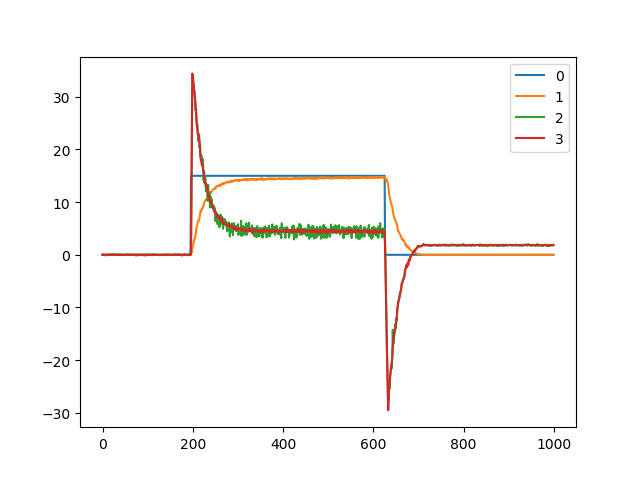
When trying to run a velocity step on Axis0 from input_vel = 10 to input_vel = 0 I get error message MOTOR_ERROR_CURRENT_LIMIT_VIOLATION. This would be all ok and I understand where it would come from, however, I do not get this error at all on Axis1 even if I run from input_vel = 20+ to input_vel = 0.
Please see liveplotter images below for axis0 and axis1 respectively:
1.input_vel
2.vel_estimate
3.Iq_measured
4.Iq_setpoint
If anyone could get me some pointers, I would really appreciate it, stopping performance is important for the project, maintaining what Axis0 can achieve would be preferred.