I have weird issue with some of my hoverboard motors in 6DOF motion rig (Same Sky AMT10E2-V encoders)
It was working properly, but today started to show problems finding index at startup.
I have .config.calibration_lockin.accel = set to -20 to search index in upper direction, because rig falls down without power.Every actuator lever stops on rubber feet.
I have signal wires to encoders with shield connected to common grounding (not GND). 22nF capacitors between Z and GND. and ferrite cores around each encoder wire.
After startup motor calibration it does index search and goes and goes constantly without stopping so I have to switch it off.
If I start with lever being higher and reverse index search then actuator starts search in down direction - it finds index everytime.
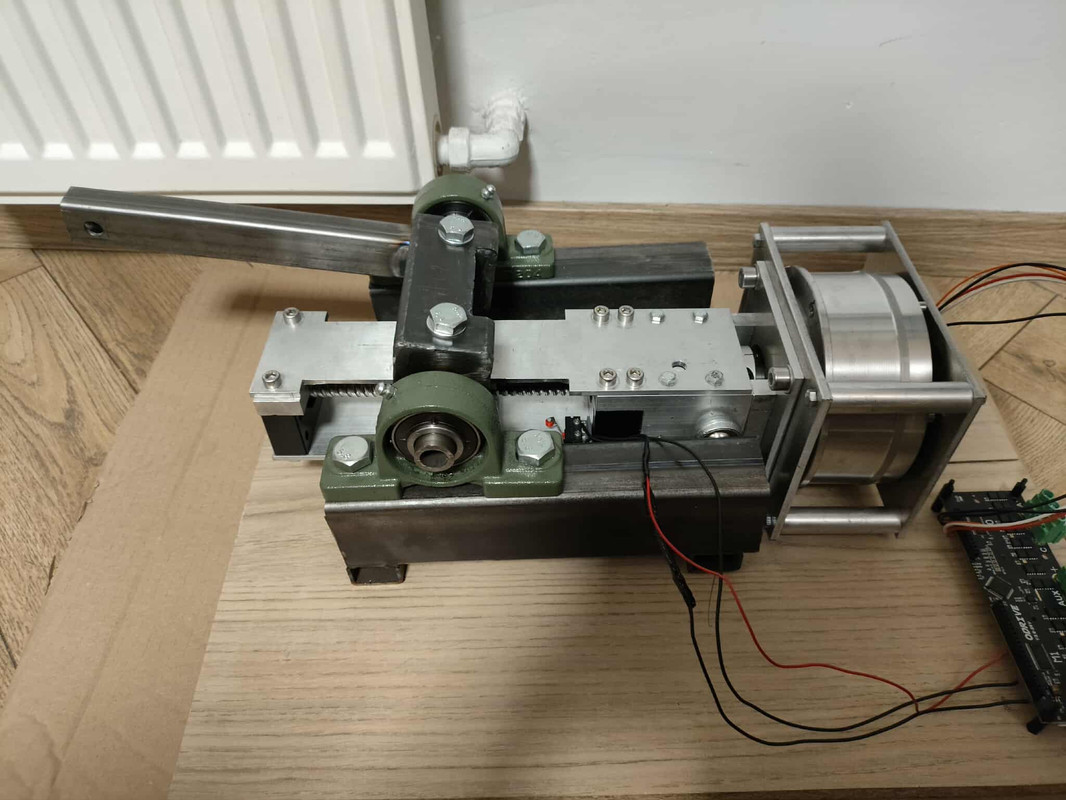
Here is how the actuator looks (i don’t use limit switch to set starting position, just make sure real index point is where I need to start)
Here is up direction:

Here is down:

I don’t understand why this happens, please help me.