Hi,
So I was running my motor with low position changes (like an input_pos += 1), and it moved to a point in my setup where it somewhat stalled. I kept getting the errors like below afterwards:
In [382]: dump_errors(odrv0)
system: not found
axis0
axis: Error(s):
UNKNOWN ERROR: 0x00000020
UNKNOWN ERROR: 0x00000040
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: Error(s):
UNKNOWN ERROR: 0x00000040
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
I also noticed that right when I rebooted the ODrive, there were no errors, but shortly after, maybe when it ran a calibration since .pre_calibrated was true, we got the errors again. However, after a little bit of doing nothing, we found that the ODrive is completely unrecognizable from odrivetool. When the USB is plugged in, odrivetool can’t find it. Any ideas/next steps?
ODrive v3.6 with 24V power
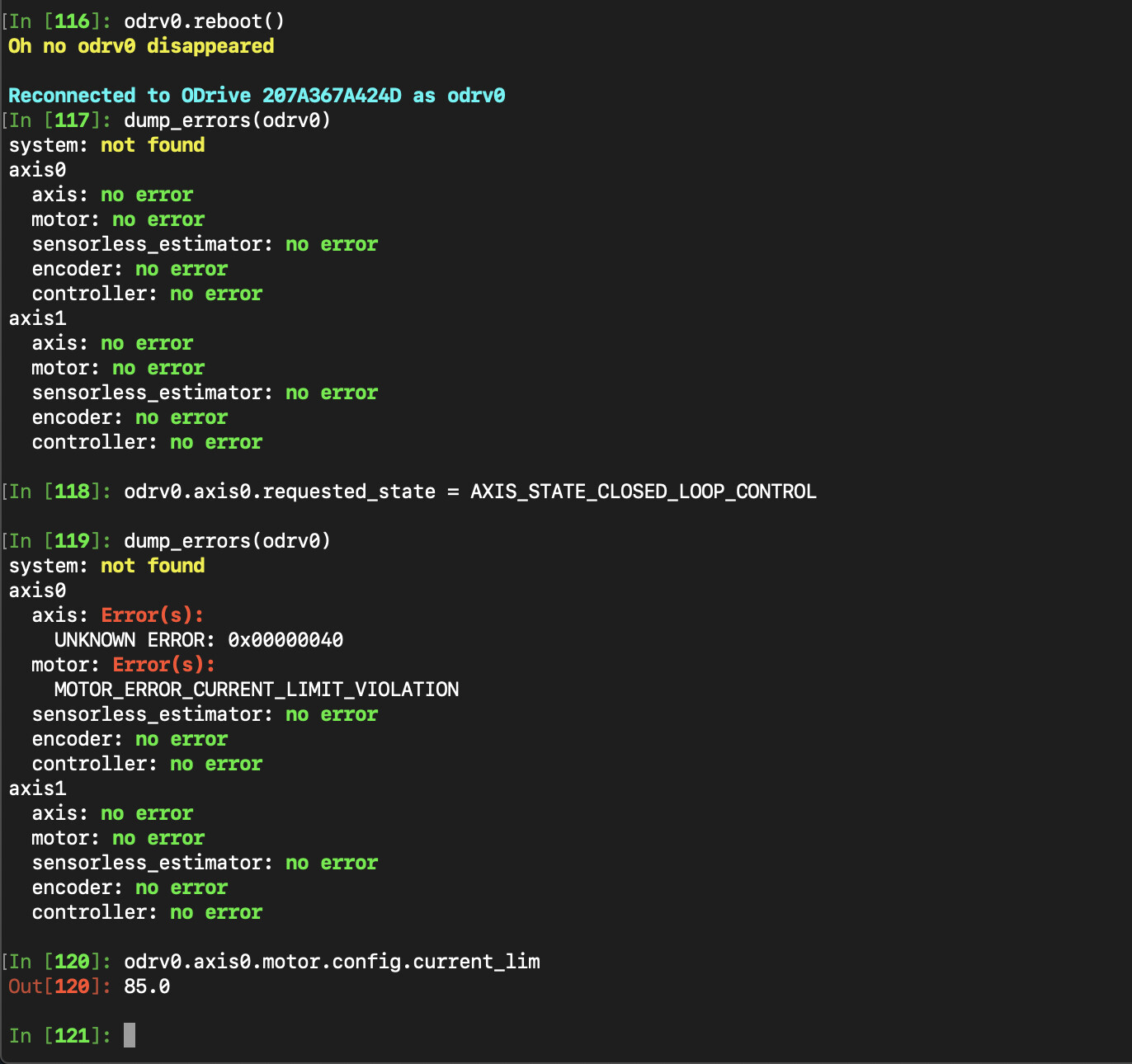
In [388]: odrv0.reboot()
Oh no odrv0 disappeared
Reconnected to ODrive 205137925753 as odrv0
In [389]: dump_errors(odrv0)
system: not found
axis0
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
In [390]: dump_errors(odrv0)
system: not found
axis0
axis: Error(s):
UNKNOWN ERROR: 0x00000020
UNKNOWN ERROR: 0x00000040
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: Error(s):
UNKNOWN ERROR: 0x00000040
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error