Hi everyone,
My name is Amit and I’m a 12th-grade high school student.
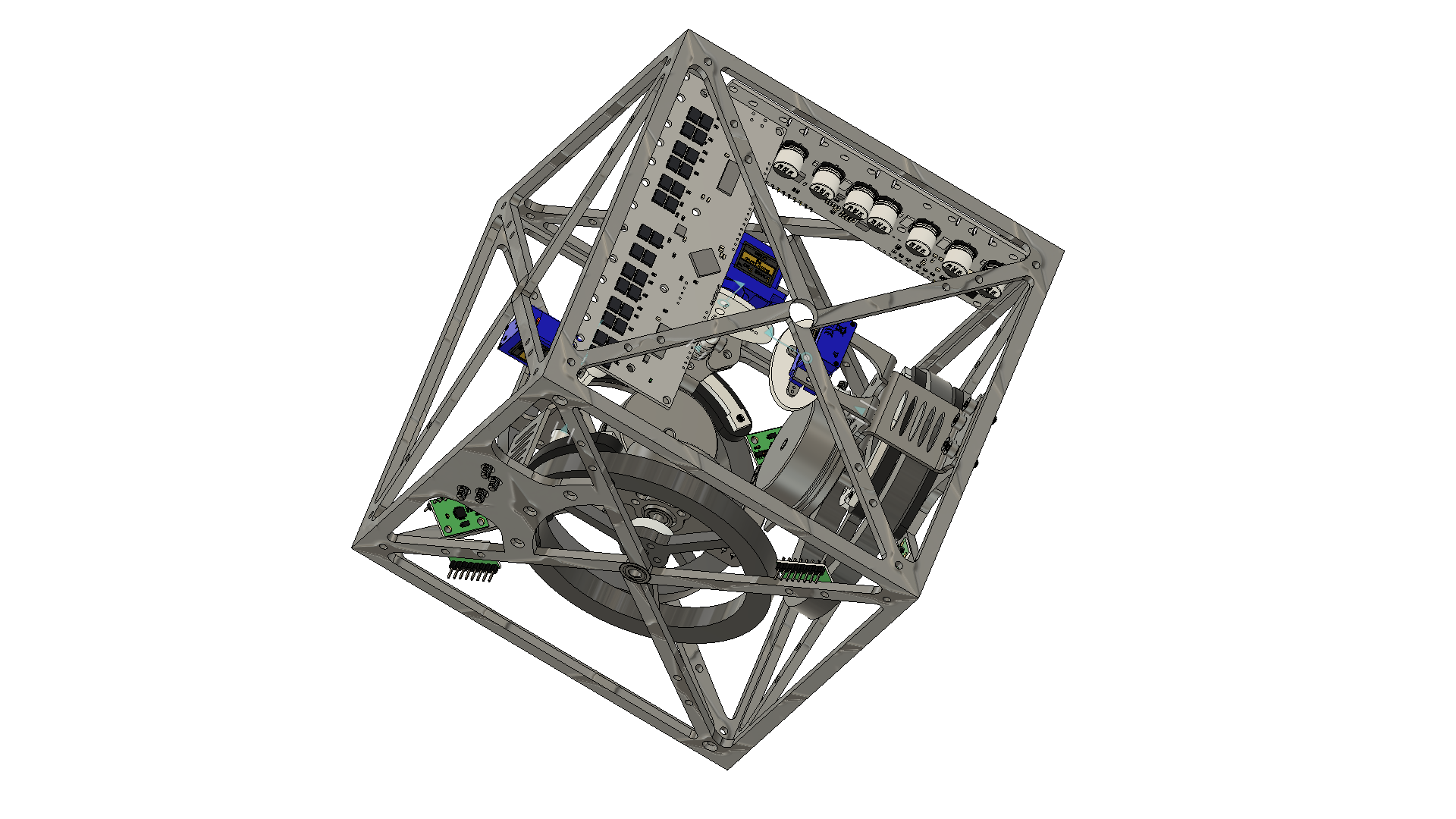
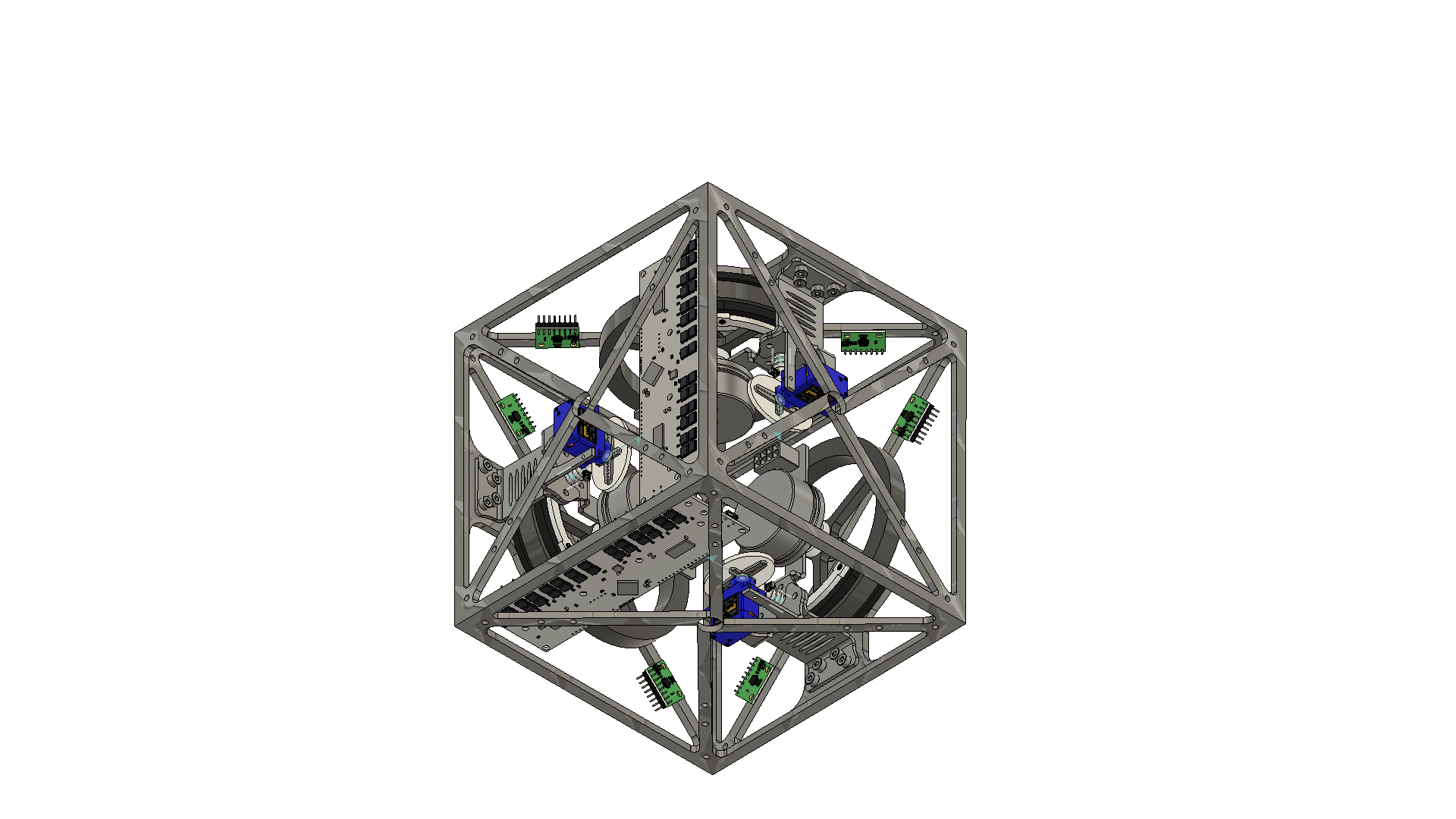
These days I’m working on my mechatronics studies final project which is a “cubli” inspired project That I decided to name “Cubex”.
(If you are not familiar with the “cubli” project you should really watch this video)
At the moment, I’m looking for a motor controller for the project and it seems that the ODrive might just fit pretty well.
In order to be sure it will do the job, I would really appreciate if you guys can answer some question about the ODrive for me:
- My motor is a hall-effect sensored bldc motor. will I be able to get the current speed in real-time?
- Is it possible to control the velocity by acceleration? can I send acceleration values that will change the speed?
- In Velocity Control Mode - is it possible to command negative speed for reversed motion?
- Is the velocity control a closed-loop?
- Is the controller what some calls a “4-quadrant” controller? can it apply negative torque to the motor while it spins in the other direction?
- Can the ODrive be controlled from a microcontroller?
- Will it work well in low speeds with 18V and Continuous current of 4 Amps? (Max current 10 amps)
And last but not least - is there any way to get a discount as my budget is very limited?
The pictures below are from my fusion360 cad design of Cubex 
Thanks in advance