Hello,
I am using an odrive 3.6 to control two motors one electric scooter hub motor and one 5065 bldc motor, both have hall encoders that are inside the motors.
motors:


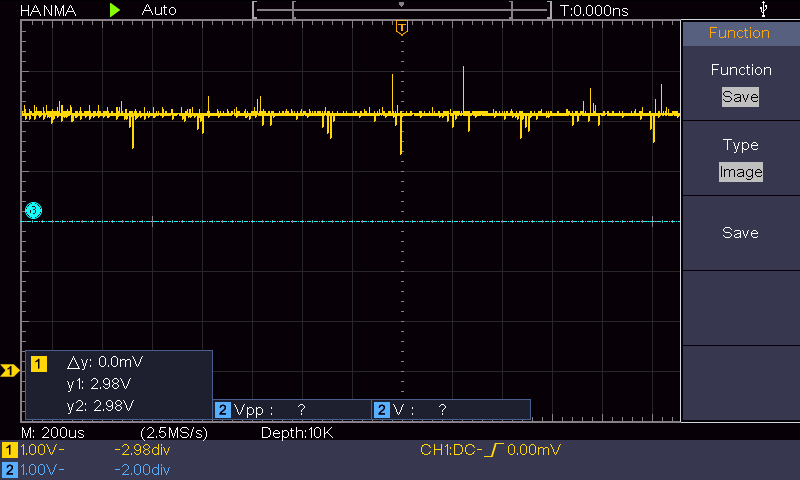
when i put only the Motors phase on the Odrive without the encoders and i check the 5v available on the odrive it looks like this on the scope:
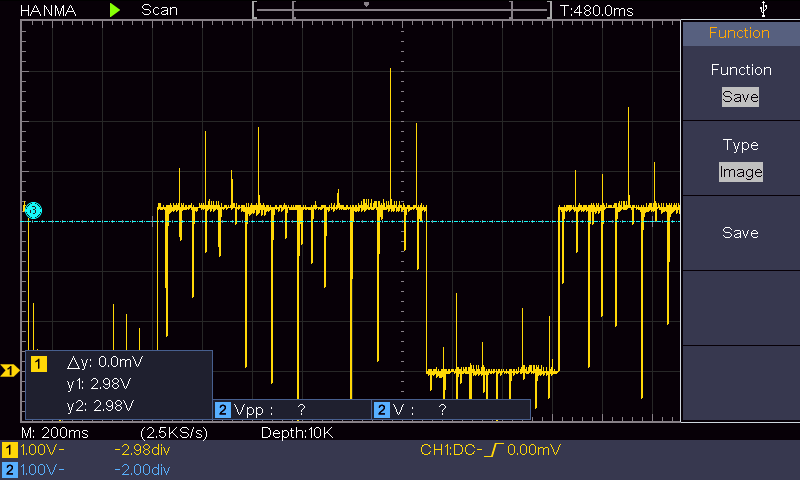
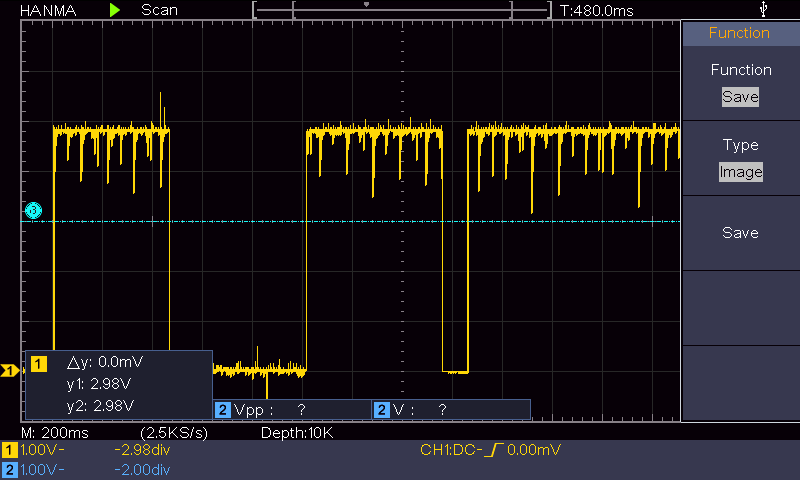
the encoders have this noise in them:
i am able to control the robot using odrivetool but the problems are :
1/ this huge noise i have on this odrive is somehow contaminating my 5V signal on other parts of the system when i link the ground to this odrive.
2/ the CAN BUS is also affected with this noise and it is not working properly
is it normal to have this noise ?