Hi,
I am flowing instruction https://docs.odriverobotics.com/hoverboard.html and I have problem with
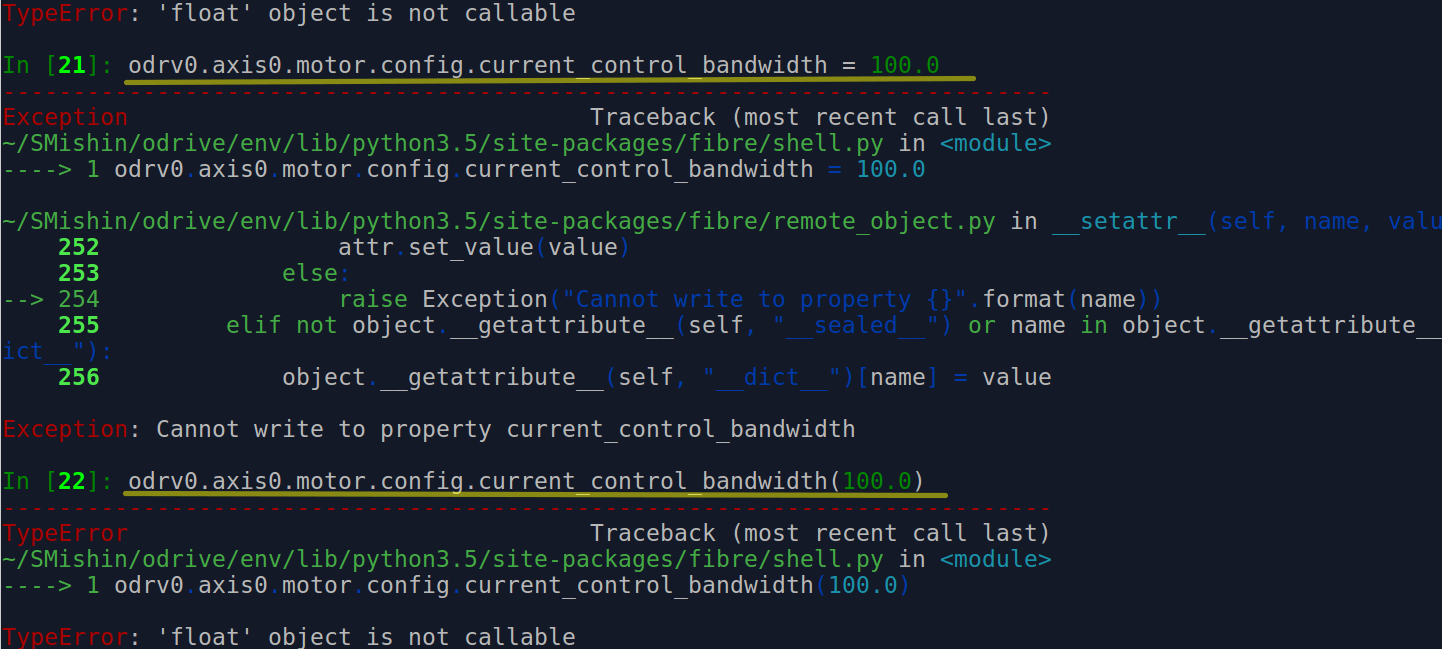
odrv0.axis0.motor.config.current_control_bandwidth = 100
In odrive tool:
Hi,
I am flowing instruction https://docs.odriverobotics.com/hoverboard.html and I have problem with
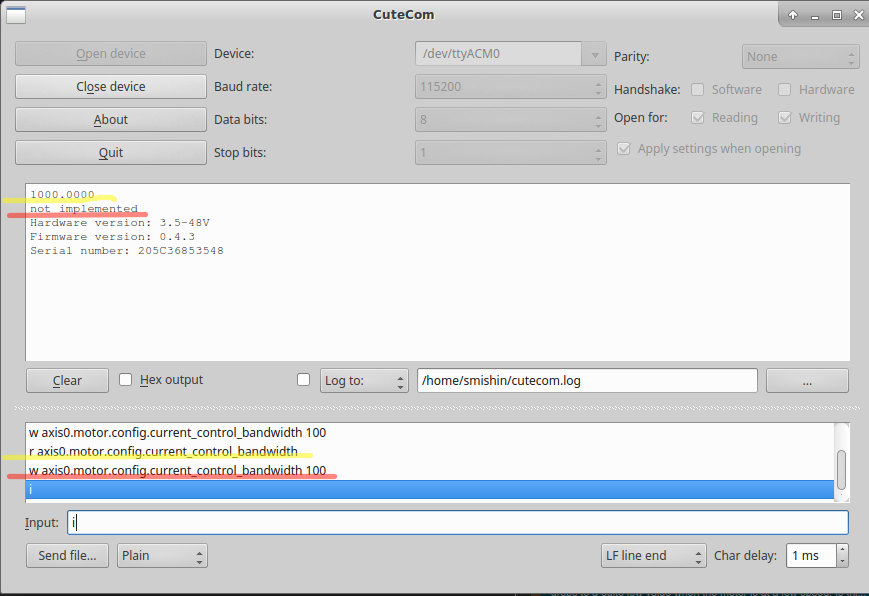
odrv0.axis0.motor.config.current_control_bandwidth = 100
In odrive tool:
Please update to the newest firmware, it should work then.