Does someone here have some experience with touchdesigner099 and the odrive? As touchdesigner is based on python they should be fairly compatible?
I am planning on using a Kinect to detect motion and making a robotic arm move accordingly. Touchdesigner seems like a decent tool, especially since it has a very nice implementation of the Kinect!
Nice!
Yes I work with touchdesigner and Arduino quite a lot as well and was hoping i could make it work similarly.
How would I format the sent out text DAT though? I’m planning on just sending out motor positions in a certain order and will probably just preconfigure them in a table DAT.
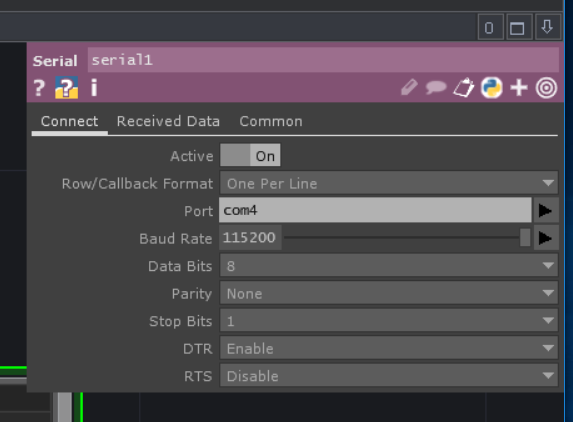
I’ve preconfigured it like this:
Would my sent out serial be just something like this?
op(‘serial1’).send(“p 1 50 *42 \n”)
I mean obviously not like just that because that doesnt seem to work.
Except for setting the Odrive up as a serial port, are there other preconfigurations I’ve got to make to make this work?
I’m an idiot.
The correct code would be :
op(‘serial1’).send(“my Values”, terminator="\n")
To send it to a serial DAT. Works great for basic position control and the likes! Works great if you want to store a bunch of data and send it out when triggered.
Hey Terry have you had any success? I started to have success with controlling the motor, but now nothing. I think odrive may have gone into a error mode. Is there a list of the ascii commands, such as how to clear errors and/or how to run calibration and set closed loop control?
here is what I am using in the CHOPEXEC DAT attached to my slider:
def valueChange(channel, sampleIndex, val, prev):
#sends the value of the slider to the serial dats send method
command = 't 1 ' + str(int(val))
op('serial2').send(command, terminator='\n')
return
I could put together a little TD toe file if you are interested, I created little button based interface that lets me reboot the odrive, reconnect over serial and rezero & calibrate.
Hey Tom!
Just finished my bachelor thesis a couple of days ago- didn’t find the time to answer earlier!
To be honest I cheated a little- I set up the Odrive entirely through Anaconda and left it running for easy debugging, because I’ve found the TouchDesigner/Ascii code caused errors more regularly (maybe also because Ive used four different serial outs as well as a Kinect as input, oops!) and I like still keeping Anacondas running for realtime debugging.
You’ve gotten way further than I have yet Would be super cool to see how you managed!

 Would be super cool to see how you managed!
Would be super cool to see how you managed!