Hello, sorry or the disturbances, I’m using the Odrive v3.4 with two hoverboard motors. I just followed the steps to setup and calibrate the motors and hall sensor encoders form here:(docs/hoverboard.md · fw-v0.4.11 · Tom Owen / ODrive · GitLab)
Then, I set up the Odrive at close loop and in current control mode:
odrv0.axis0.config.startup_closed_loop_control = True
odrv0.axis1.config.startup_closed_loop_control = True
odrv0.axis0.controller.config.control_mode = 1
odrv0.axis1.controller.config.control_mode = 1
With a Python script I send current setpoints using odrivetool module. The setpoint that I imposed is a smooth oscilation between 2.0 and -2.0 (Ampers)
The motors starts following the SP, but in a few seconds, one of the motors stop by the error “CURRENT_LIMIT_VIOLATION”. When I plot, using odrivetool liveplotter, it shows this:
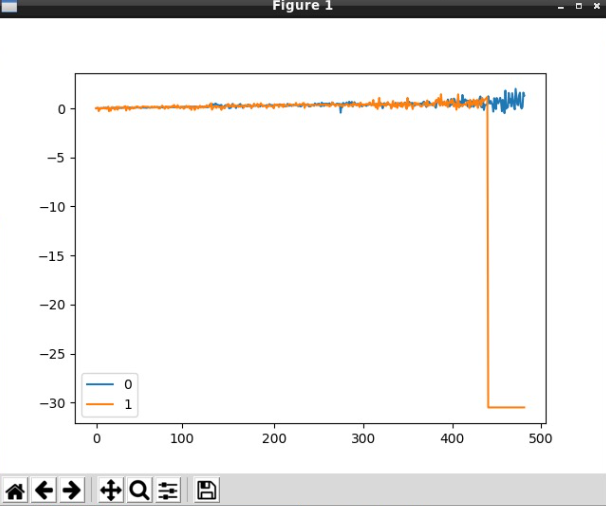
Anyone knows why is throwing “spikes of current”?
Here are the motos and encoder information:
MOTOR 0:
DC_calib_phB: -1.3629391193389893 (float)
DC_calib_phC: -1.8028711080551147 (float)
armed_state: 3 (uint8)
config:
calibration_current: 5.0 (float)
current_control_bandwidth: 100.0 (float)
current_lim: 10.0 (float)
current_lim_tolerance: 1.25 (float)
direction: -1 (int32)
inverter_temp_limit_lower: 100.0 (float)
inverter_temp_limit_upper: 120.0 (float)
motor_type: 0 (uint8)
phase_inductance: 0.0005008394364267588 (float)
phase_resistance: 0.3682558536529541 (float)
pole_pairs: 15 (int32)
pre_calibrated: True (bool)
requested_current_range: 25.0 (float)
resistance_calib_max_voltage: 4.0 (float)
current_control:
I_measured_report_filter_k: 1.0 (float)
Ibus: -0.0002657632576301694 (float)
Id_measured: 0.12488400936126709 (float)
Iq_measured: 0.021120458841323853 (float)
Iq_setpoint: -0.0 (float)
final_v_alpha: 0.16631639003753662 (float)
final_v_beta: -0.008687477558851242 (float)
i_gain: 36.825584411621094 (float)
max_allowed_current: 30.375 (float)
overcurrent_trip_level: 33.75 (float)
p_gain: 0.0500839427113533 (float)
v_current_control_integral_d: -0.1777316927909851 (float)
v_current_control_integral_q: 0.011990462429821491 (float)
current_meas_phB: -0.00720977783203125 (float)
current_meas_phC: 0.051066040992736816 (float)
error: 0 (uint16)
gate_driver:
drv_fault: 0 (uint16)
get_inverter_temp(obj: object_ref) → result: float
is_calibrated: True (bool)
phase_current_rev_gain: 0.012500000186264515 (float)
thermal_current_lim: 40.75679016113281 (float)
timing_log:
TIMING_LOG_ADC_CB_DC: 12854 (uint16)
TIMING_LOG_ADC_CB_I: 2654 (uint16)
TIMING_LOG_ENC_CALIB: 0 (uint16)
TIMING_LOG_FOC_CURRENT: 7886 (uint16)
TIMING_LOG_FOC_VOLTAGE: 0 (uint16)
TIMING_LOG_GENERAL: 0 (uint16)
TIMING_LOG_IDX_SEARCH: 0 (uint16)
TIMING_LOG_MEAS_L: 0 (uint16)
TIMING_LOG_MEAS_R: 0 (uint16)
MOTOR 1:
DC_calib_phB: -0.7919875383377075 (float)
DC_calib_phC: -1.0863367319107056 (float)
armed_state: 3 (uint8)
config:
calibration_current: 5.0 (float)
current_control_bandwidth: 100.0 (float)
current_lim: 10.0 (float)
current_lim_tolerance: 1.25 (float)
direction: -1 (int32)
inverter_temp_limit_lower: 100.0 (float)
inverter_temp_limit_upper: 120.0 (float)
motor_type: 0 (uint8)
phase_inductance: 0.00043691793689504266 (float)
phase_resistance: 0.3622203469276428 (float)
pole_pairs: 15 (int32)
pre_calibrated: True (bool)
requested_current_range: 25.0 (float)
resistance_calib_max_voltage: 4.0 (float)
current_control:
I_measured_report_filter_k: 1.0 (float)
Ibus: 0.00017255143029615283 (float)
Id_measured: 0.042284417897462845 (float)
Iq_measured: -0.006018027663230896 (float)
Iq_setpoint: -0.0 (float)
final_v_alpha: 0.02622080221772194 (float)
final_v_beta: -0.008210791274905205 (float)
i_gain: 36.22203826904297 (float)
max_allowed_current: 30.375 (float)
overcurrent_trip_level: 33.75 (float)
p_gain: 0.04369179531931877 (float)
v_current_control_integral_d: -0.011761119589209557 (float)
v_current_control_integral_q: 0.03673858195543289 (float)
current_meas_phB: 0.06668400764465332 (float)
current_meas_phC: -0.04068160057067871 (float)
error: 0 (uint16)
gate_driver:
drv_fault: 0 (uint16)
get_inverter_temp(obj: object_ref) → result: float
is_calibrated: True (bool)
phase_current_rev_gain: 0.012500000186264515 (float)
thermal_current_lim: 40.87255096435547 (float)
timing_log:
TIMING_LOG_ADC_CB_DC: 14854 (uint16)
TIMING_LOG_ADC_CB_I: 3910 (uint16)
TIMING_LOG_ENC_CALIB: 0 (uint16)
TIMING_LOG_FOC_CURRENT: 11422 (uint16)
TIMING_LOG_FOC_VOLTAGE: 0 (uint16)
TIMING_LOG_GENERAL: 0 (uint16)
TIMING_LOG_IDX_SEARCH: 0 (uint16)
TIMING_LOG_MEAS_L: 0 (uint16)
TIMING_LOG_MEAS_R: 0 (uint16)
ENCODER 0:
calib_scan_response: 0.0 (float)
config:
bandwidth: 100.0 (float)
calib_range: 0.019999999552965164 (float)
calib_scan_distance: 150.0 (float)
calib_scan_omega: 12.566370964050293 (float)
cpr: 90 (int32)
enable_phase_interpolation: True (bool)
find_idx_on_lockin_only: False (bool)
idx_search_unidirectional: False (bool)
ignore_illegal_hall_state: False (bool)
mode: 1 (uint8)
offset: -65 (int32)
offset_float: -0.47747981548309326 (float)
pre_calibrated: True (bool)
use_index: False (bool)
zero_count_on_find_idx: True (bool)
count_in_cpr: 3 (int32)
error: 0 (uint8)
hall_state: 6 (uint8)
index_found: False (bool)
interpolation: 0.5 (float)
is_ready: True (bool)
phase: 3.1180100440979004 (float)
pos_cpr: 3.9751410484313965 (float)
pos_estimate: 3.9751410484313965 (float)
set_linear_count(obj: object_ref, count: int32)
shadow_count: 3 (int32)
vel_estimate: 0.0 (float)
ENCODER 1:
calib_scan_response: 0.0 (float)
config:
bandwidth: 100.0 (float)
calib_range: 0.019999999552965164 (float)
calib_scan_distance: 150.0 (float)
calib_scan_omega: 12.566370964050293 (float)
cpr: 90 (int32)
enable_phase_interpolation: True (bool)
find_idx_on_lockin_only: False (bool)
idx_search_unidirectional: False (bool)
ignore_illegal_hall_state: False (bool)
mode: 1 (uint8)
offset: -70 (int32)
offset_float: 0.4842918813228607 (float)
pre_calibrated: True (bool)
use_index: False (bool)
zero_count_on_find_idx: True (bool)
count_in_cpr: 88 (int32)
error: 0 (uint8)
hall_state: 4 (uint8)
index_found: False (bool)
interpolation: 0.5 (float)
is_ready: True (bool)
phase: 2.1108078956604004 (float)
pos_cpr: 88.02497863769531 (float)
pos_estimate: -1.9762533903121948 (float)
set_linear_count(obj: object_ref, count: int32)
shadow_count: -2 (int32)
vel_estimate: 0.0 (float)