Hello,
I would like to have the help of the Odrive community to know which gearboxes are compatible with the motors - Odrive D5065 270KV and OdriveD6374 150KV
I am looking for planetary gearboxes
These are hobby-style motors, which are not specifically designed for any gearbox… They are also out-runners, and most off-the-shelf gearboxes will be designed to work with in-runner motors only.
However, it’s possible to convert them into in-runners with a 3D-printed NEMA-style housing.
Any gearbox accepting the speed & torque range of the motors can be made to work, provided you can adapt it mechanically to couple the input onto the motor shaft.
Thank you for your help
Well, almost all can be done. This was a test design to fit an Apex Dynamics PD053 planetary gearbox (2 stages) with “built-in” E2-5000 encoder and D5065 motor. Only two small flanges were needed and the one supplied with the gearbox removed to allow for a compact design.
If you are familiar with industrial gearboxes, the motor flange and coupling are the parts to change to fit different motor standards. If you are able to configure the gearbox to the correct input shaft diameter the motor should fit with a custom flange, in fact, smaller motors require a sleeve in the shaft to increase its size, it is common among different brands.

Thank you for your help,
Could you tell me if there are Apex Dynamics planetary gearboxes compatible with DOUBLE SHAFT MOTORS - D6374 150KV
@chrisophe I think that’s what the ‘D’ in D5065 stands for. 
Also, you can see in @ivreguera’s CAD that there is a shaft sticking out the back, so obviously he is using a double shaft motor.
However, it looks like the gearbox is attached to the “back” shaft, so that it can make use of the mounting holes.
This is normally where the encoder would go. So I wonder where he is putting his encoder.
after the search, i can’t find anything on the CAD of ivreguera. would you have a link
please
It is only a sketch but is doable.
I use the encoder without housing, as a kit bolted to the motor flange. One motor bolt is under the encoder but can be used (countersunk for example). Once you assemble motor+flange+encoder you attach the second flange to the gearbox.
Is tricky because I wanted a “slim design” but with those deep pockets for the bolts you can slide the bolt and then be able to tighten. Easy way, make the flanges bigger and increase bolt circurcunference diameter.
I am not good at Fusion 360 but here some pictures.
It is valid for Apex, Wittenstein, etc.


You biggest issue is going to be shaft size. Nema 17 is 5mm and nema 23 is 14mm. You can often get by with a bushing on nema 23, for nema 17 you need to turn the shaft down or use a coupler.
Thank you very much to the community for your help.
I have gotten closer to the manufacturer Apex and I think I should get out of my problem quickly.
They are very pleasant, available and professional
Not really an issue, almost all gearboxes sizes will work with a motor diameter range from A to B, the difference is the flange and coupling machining they supply.
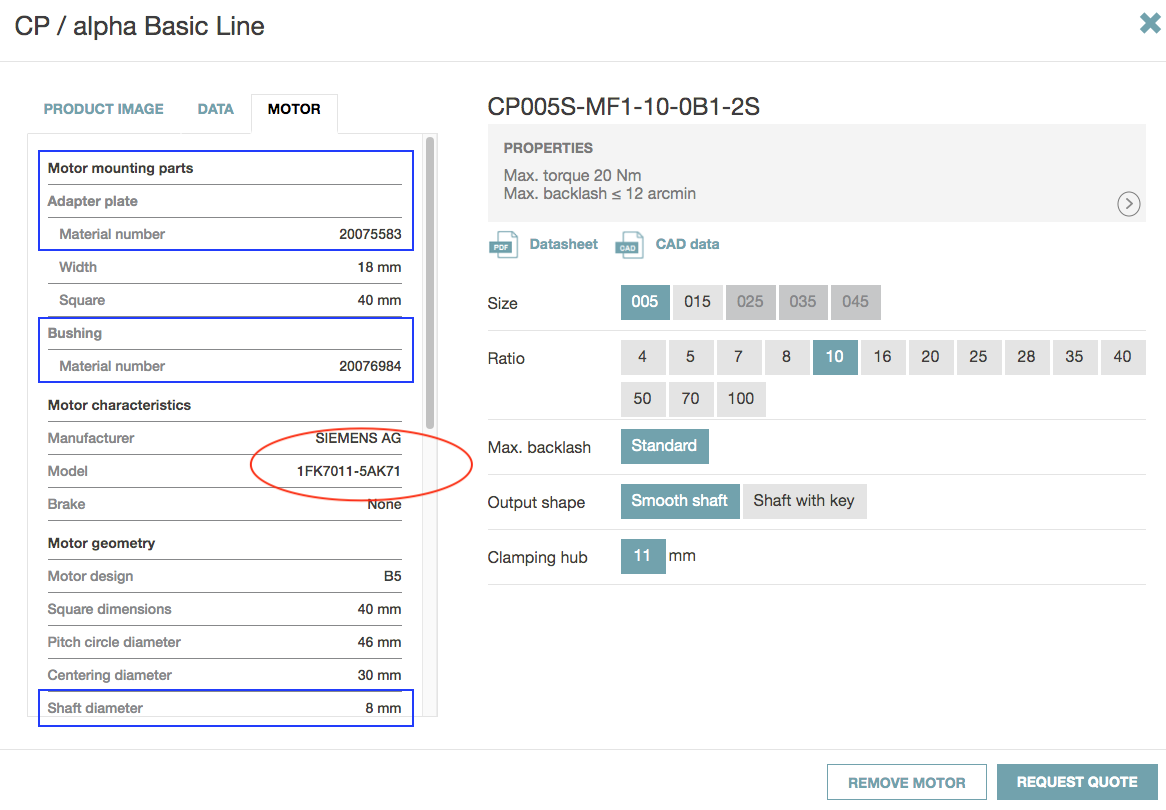
You should choose a gearbox configured for a known servomotor/stepper (Siemens, Allen Bradley, Festo, etc) with a 8 mm shaft and then make your custom flanges. NEMA sizes are popular but they are not (I think) the industry standard, in fact, servomotors sizes are based on shaft height instead of diameter.
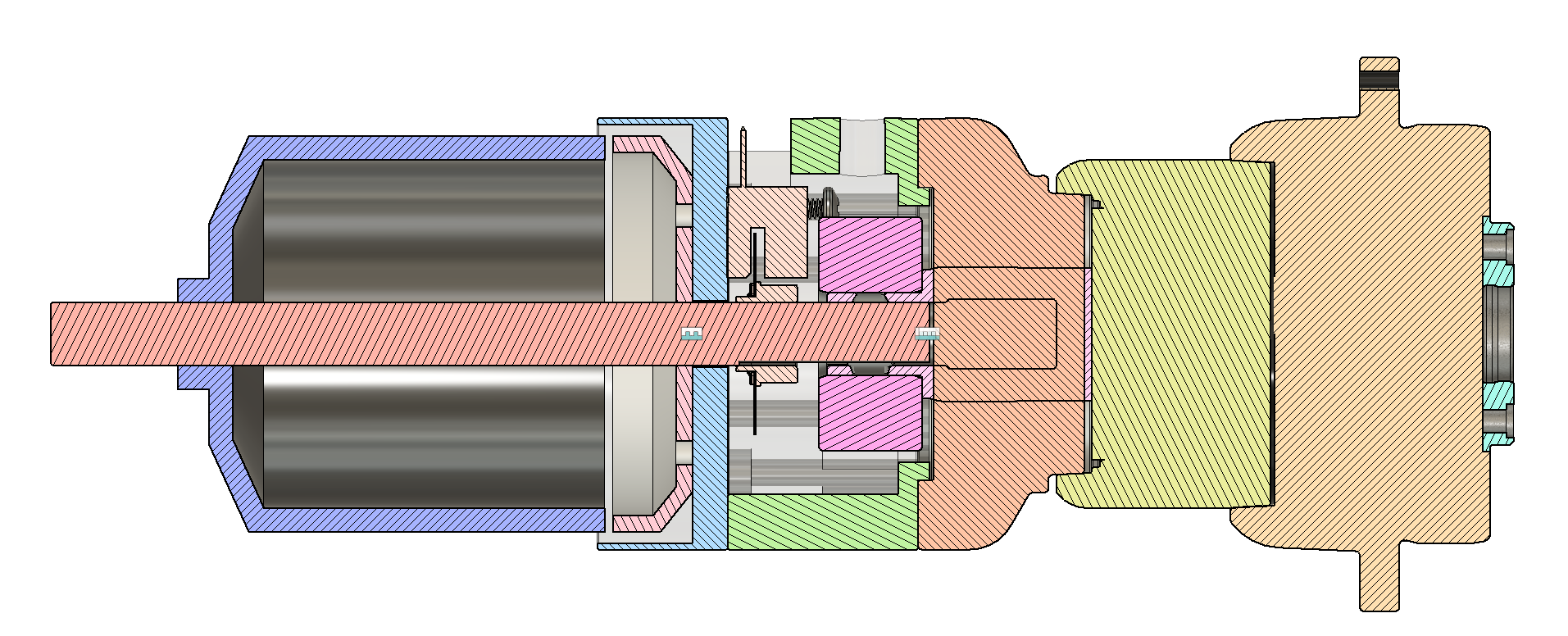
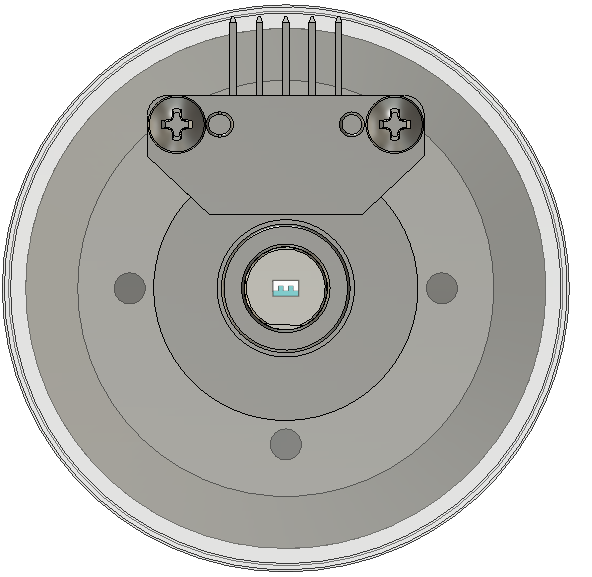
Attached a configuration for a basic Wittenstein CP05 single stage planetary gearbox and Siemens 1FK7011----. Should be around 150 eur. Max torque rating is 20 Nm and 10:1 ratio, so, with proper dynamics settings (acceleration, jerk,…) is in the limit of the 2 Nm from a 5064 brushless. Alternatives:
- Greater gearbox size: CP015 and 10:1
- Same CP05 but 8:1
- Others…
Note that cheaper/basic gearboxes have “lots” of backlash and are not the best for positioning, will depend on the final ratio (belt, rack, spindle). Lower backlash will make a huge difference in price.
1 Like