I have an odrive micro with a SPI encoder, and I have set it to absolute encoder reference frame with an offset to home it.
If I use the GUI to enable and command the micro, it works as expected with requested positions moving the odrive in the absolute reference frame. If I initialize it from CAN, setting the odrive to AXIS_STATE_CLOSED_LOOP_CONTROL, then requesting a position move with Set_Input_Pos message, it will move to what appears to be the boot reference frame.
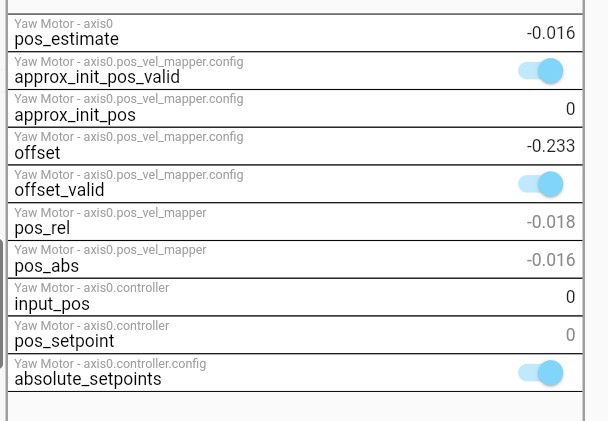
If I then go to the GUI and request a position move, the odrive will not go to the position requested (even though it correctly reports it’s current position in the absolute frame). I’ve attached a gif of a requested move, with the odrive moving to the wrong position (note that I have confirmed that it isn’t just overshooting the setpoint – where it stops in the gif is actually where it is trying to go)
What next steps can I do to debug this?
Thanks!