We are college engineering students on a robotics team. Our team is working to develop a semi-autonomous Mars rover capable of autonomous navigation, presence of life detection, equipment servicing, and more.
Currently, we are designing our drive system including the motors and any accompanying electrical hardware to control them. Our specs are as follows:
The battery is made of lithium-ion cells in a 6s22p configuration outputting 22.2V nominal, 25.2V max, 77Ah, and 220A max
We estimated we need a total torque of about 2.35 Nm per motor and we are planning to use 6 motors with a 16:1 gearbox ratio
Our tentative wheels have a diameter of 8.5 in. and would look to be going around 5 mph. Our rover would be about 50kg.
Questions:
We have had a very difficult time researching motors thus far and are wondering if you have any advice/recommendations on particular motors for our specifications or what to look for when researching? Are there any specific metrics to look for in regards to such motors?
We are considering purchasing the linked Hobbysky motor below with the ODrive 24V motor controllers. However, we are unsure how these would work our 22.2V nominal battery and the 24V ODrive controllers as the motor specifications give a range of voltage between 11.1V - 29.6V. Has anyone done extensive testing or anything with these motors? If so, how much voltage and current can we expect to be required to supply about the 2.35 Nm of torque that we need?
At the motor, or at the axle after the gearbox? If the rover weighs 50kg, has to go up a 30 degree slope, then you need to support ~ 25kg of load, so ~ 250N of force at earth gravity. That’s about 27Nm total, or about 4.4Nm per wheel at the axle. With a 16:1 gearbox, you need at least 0.27Nm of torque at the motor.
You need something that isn’t going to fail if it get filled with dirt, and doesn’t get too hot in a near-zero atmosphere on Mars
25.2V max,
Use a 56V ODrive for your voltage / battery. The motor voltage rating doesn’t matter, as long as you limit the speed (voltage ratings are generally speed ratings on hobby grade stuff).
Those 5065 motors are basically the same as the ODrive ones, but we add a through shaft so you can mount an encoder on the back Dual Shaft Motor - D5065 270kv — ODrive
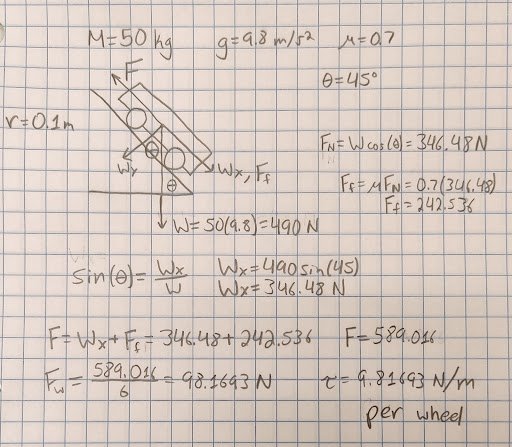
Thank you for getting back to me. Our calculations are based at the motor and account for friction and gravity at a 45degree angle (worst case):
From there we do torque / 16 = 0.614Nm per wheel to which we gave a ~3-4x multiplier to get 2.35Nm per wheel for leeway and a margin of safety. Do you think this multiplier is too high/too low? We do plan to be in some hot weather with dirt as you said so we figured we would add this level of safety especially as we haven’t tested with these motors.
Also, if we were to purchase a motor without an encoder, would an external encoder be required to make things work with the ODrive 56V motor controllers? If not, would you still recommend we use a motor encoder with the ODrive controllers?
Static friction isn’t really relevant to vehicle wheels in the way you’ve written. The effort to get a rolling vehicle moving is going to be a function of the coefficient of rolling resistance of the tire C_{rr}, not \mu.
See this handy reference Rolling Resistance for some ballpark C_{rr} values.
4x means you could pull what, a 3g acceleration up a 45degree slope? Do you ever think you’re going to have to do that?
A margin of safety is valuable, but give it some actual real reason. Most hobby motors can do ~1/3 to 1/4 of their rated torque continuously due to thermal reasons. So if you think you’ll need to maintain that torque continuously, then your ballpark is reasonable. If you think you can get up and over the slope in a few seconds, then it may not have a valid engineering reason to be so large.
Encoders are mandatory for FOC/ODrive. You either need Hall sensors (velocity and torque mode only) or an encoder (position control also allowed, and you get better velocity control).
For your DUAL SHAFT MOTOR - D5065 270KV motors, do you have a recommended 16:1 ratio gearbox that would easily integrate with these? The one we originally planned to use has a significantly different mounting hole alignment than these motors and so we thought we would devote some time to finding new gearboxes instead.