We followed the schematic here: “CAN Bus Guide — ODrive Documentation 0.6.8 documentation”. Our Oscilloscope and Logic analyser couldn’t even detect anything resembling a CAN signal, is there a requirement before the odrive starts submitting? we tried a newly flashed odrive as well as one set up with a motor.
Thanks for your reply.
Just to confirm - the CAN_GND is connected to DC- at a single point, correct? This is a requirement for CAN to work. Note that explicitly this isn’t just connecting CAN_GND to the ground of your scope/logic analyzer, but DC- as well.
And the ODrive is running firmware v0.6.8?
After setting the CAN parameters in the GUI/ODrivetool, the ODrive’s configuration was saved (with odrv0.save_configuration() in ODrivetool and the save_configuration button in the GUI inspector)?
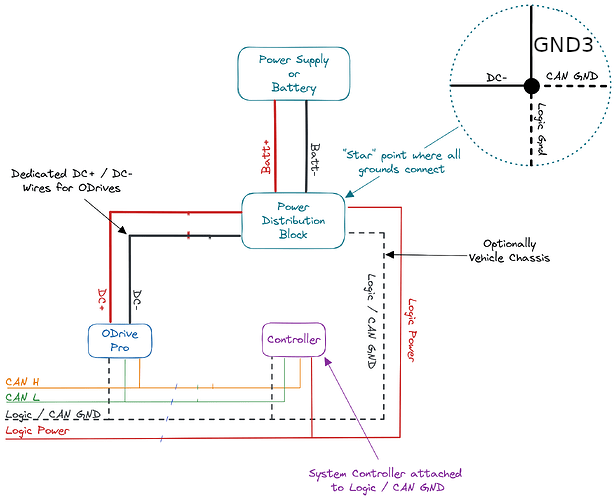
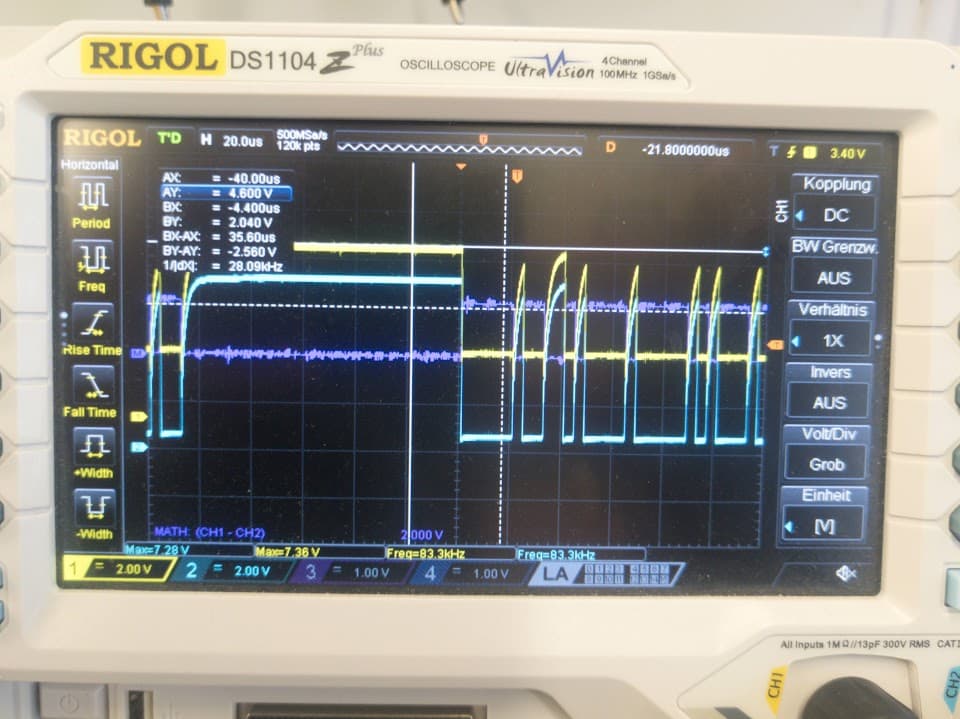
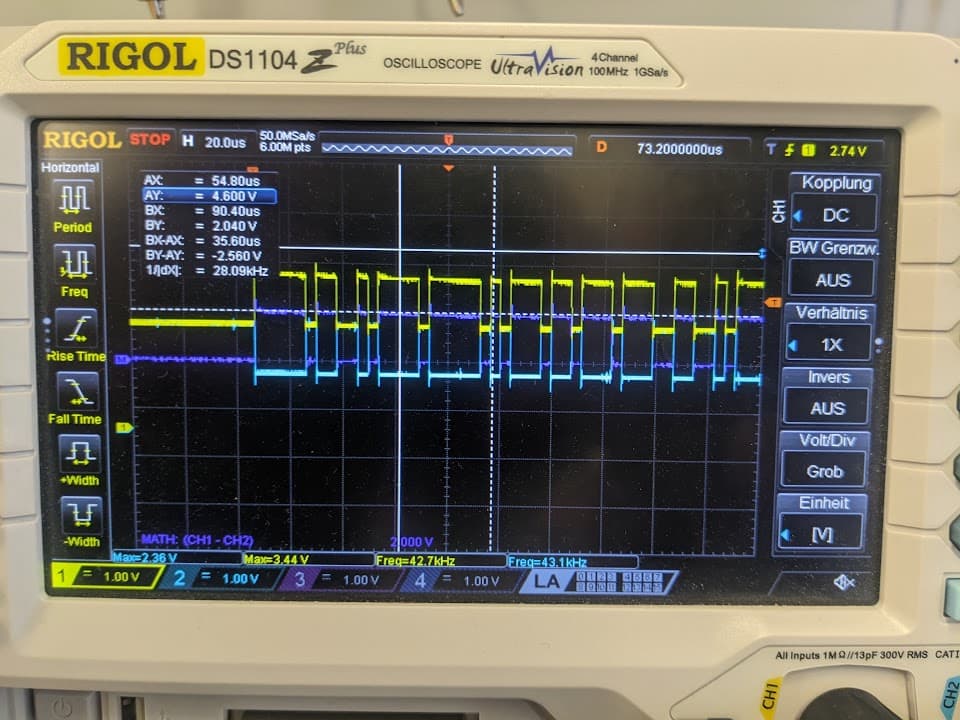
So CAN_GND is connected to GND on FEEDBACK_IO? While there isn’t steady-state resistance, there’s filtering components between FEEDBACK_IO GND and DC-. There’s a good chance that’s what’s causing the strange inverted readings you’re getting.
Just checking - both sides of the bus have a 120 ohm termination resistor? Is the ODrive powered? The ODrive Pro requires either power from DC+/DC- (above 12V) or an external 12V input over CAN_12V/CAN_GND for the CAN transceiver to come online.