Is it possible to control ODrive Pro with STM32F446RE + MCP2551 using CAN communication? I tried it a little but it didn’t work at all.
Calibrated with ODriveGUi
Yep absolutely. You can see our CAN protocol here: CAN Protocol — ODrive Documentation 0.6.11 documentation
If you want to show some of your code, happy to take a look!
1 Like
thank you!! This is a part of the code. I will omit the definition of id, basic can send, receive, and filter.
#ifndef ODRIVE_H_
#define ODRIVE_H_
#include "main.h"
// ODrive CAN Command IDs
typedef enum {
ODRIVE_CMD_HEARTBEAT = 0x01,
ODRIVE_CMD_SET_AXIS_STATE = 0x07,
ODRIVE_CMD_GET_ENCODER_ESTIMATES = 0x09,
ODRIVE_CMD_SET_INPUT_VEL = 0x0D,
ODRIVE_CMD_CLEAR_ERRORS = 0x18,
ODRIVE_CMD_SET_CONTROLLER_MODES = 0x0B
} ODriveCommandID;
// ODrive Axis States
typedef enum {
ODRIVE_AXIS_STATE_IDLE = 1,
ODRIVE_AXIS_STATE_FULL_CALIBRATION_SEQUENCE = 3,
ODRIVE_AXIS_STATE_CLOSED_LOOP_CONTROL = 8
} ODriveAxisState;
// ODrive Control Modes
typedef enum {
VOLTAGE_CONTROL = 0,
TORQUE_CONTROL = 1,
VELOCITY_CONTROL = 2,
POSITION_CONTROL = 3
} ODriveControlMode;
// ODrive Input Modes
typedef enum {
INACTIVE = 0,
PASSTHROUGH = 1,
VEL_RAMP = 2,
POS_FILTER = 3,
MIX_CHANNELS = 4,
TRAP_TRAJ = 5,
TORQUE_RAMP = 6,
MIRROR = 7
} ODriveInputMode;
// ODrive feedback
typedef struct {
float pos_estimate;
float vel_estimate;
uint32_t axis_error;
uint8_t axis_state;
} ODriveFeedback_t;
// ODrive axis
typedef struct {
CAN_HandleTypeDef* CAN_INSTANCE;
uint8_t AXIS_ID;
ODriveFeedback_t feedback;
} Axis;
void ODrive_RX_CallBack(Axis* axis);
void Set_Axis_Requested_State(Axis axis, ODriveAxisState state);
void Set_Input_Vel(Axis axis, float velocity, float torque_feedforward);
void Set_Controller_Modes(Axis axis, ODriveControlMode control_mode, ODriveInputMode input_mode);
#endif /* ODRIVE_H_ */
`
odrive.c
#include "ODrive.h"
#include <string.h>
static void pack_float(uint8_t* data, float value) {
memcpy(data, &value, sizeof(float));
}
static float unpack_float(uint8_t* data) {
float value;
memcpy(&value, data, sizeof(float));
return value;
}
static void send_can_message(CAN_HandleTypeDef* hcan, uint32_t id, uint8_t* data, uint8_t len) {
CAN_TxHeaderTypeDef TxHeader;
uint32_t TxMailbox;
TxHeader.StdId = id;
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.DLC = len;
TxHeader.TransmitGlobalTime = DISABLE;
while (HAL_CAN_GetTxMailboxesFreeLevel(hcan) == 0); // wait
if (HAL_CAN_AddTxMessage(hcan, &TxHeader, data, &TxMailbox) != HAL_OK) {
Error_Handler();
}
}
// build can message id
static uint32_t build_can_id(uint8_t axis_id, uint8_t cmd_id) {
return (axis_id << 5) | cmd_id;
}
void ODrive_RX_CallBack(Axis* axis) {
CAN_RxHeaderTypeDef rx_header;
uint8_t rx_data[8];
// get message from FIFO
if (HAL_CAN_GetRxMessage(axis->CAN_INSTANCE, CAN_RX_FIFO0, &rx_header, rx_data) != HAL_OK) {
return;
}
uint8_t cmd_id = rx_header.StdId & 0x1F;
switch (cmd_id) {
case ODRIVE_CMD_HEARTBEAT:
axis->feedback.axis_error = (rx_data[3] << 24) | (rx_data[2] << 16) | (rx_data[1] << 8) | rx_data[0];
axis->feedback.axis_state = rx_data[4];
break;
case ODRIVE_CMD_GET_ENCODER_ESTIMATES:
axis->feedback.pos_estimate = unpack_float(&rx_data[0]);
axis->feedback.vel_estimate = unpack_float(&rx_data[4]);
break;
}
}
void Set_Axis_Requested_State(Axis axis, ODriveAxisState state) {
uint8_t payload[8] = {0};
payload[0] = (uint8_t)state;
uint32_t can_id = build_can_id(axis.AXIS_ID, ODRIVE_CMD_SET_AXIS_STATE);
send_can_message(axis.CAN_INSTANCE, can_id, payload, 4);
}
void Set_Input_Vel(Axis axis, float velocity, float torque_feedforward) {
uint8_t payload[8] = {0};
pack_float(&payload[0], velocity);
pack_float(&payload[4], torque_feedforward);
uint32_t can_id = build_can_id(axis.AXIS_ID, ODRIVE_CMD_SET_INPUT_VEL);
send_can_message(axis.CAN_INSTANCE, can_id, payload, 8);
}
void Set_Controller_Modes(Axis axis, ODriveControlMode control_mode, ODriveInputMode input_mode) {
uint8_t payload[8] = {0};
payload[0] = (uint8_t)control_mode;
payload[4] = (uint8_t)input_mode;
uint32_t can_id = build_can_id(axis.AXIS_ID, ODRIVE_CMD_SET_CONTROLLER_MODES);
send_can_message(axis.CAN_INSTANCE, can_id, payload, 8);
}
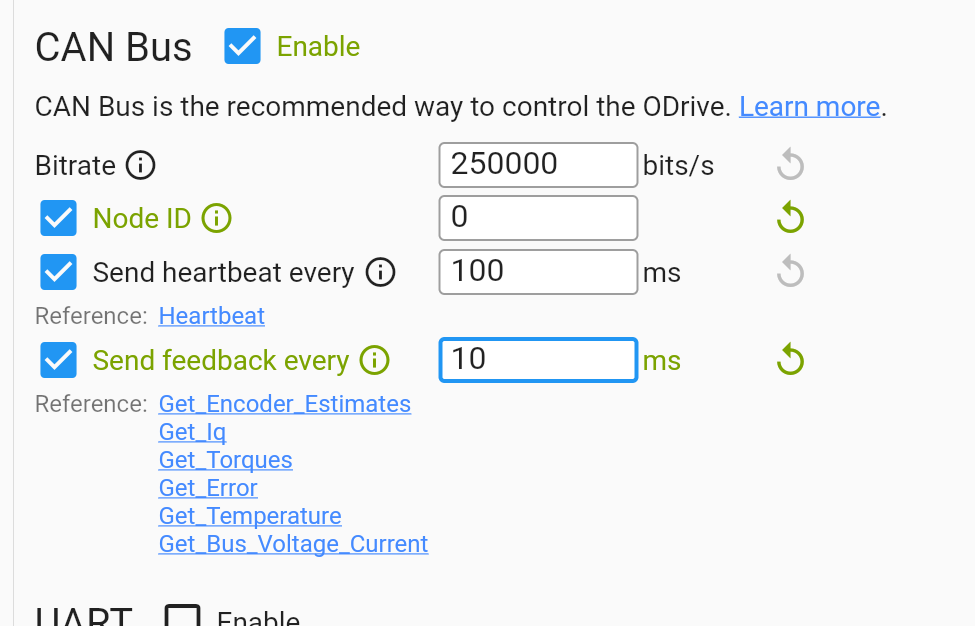
What CAN bit timing parameters are you using? I like this calculator: http://www.bittiming.can-wiki.info/
Do you have an external USB-CAN dongle you can use to verify the F4 is sending messages correctly?
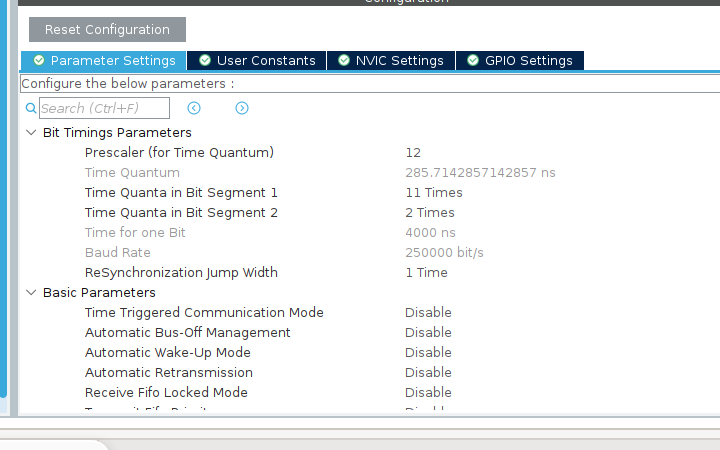
I think that CAN timing looks correct. I would definitely use the USB-CAN adapter to look at the raw packets being sent – if you can show me those, it should really help with diagnosing.
CAN messages were sent and received! Sending a speed-controlled message
I can’t get out of idle mode even after connecting. Please help.
Are you able to receive heartbeat messages from the ODrive? It’s worth enabling those and verifying you can get them.
It seems like it’s not receiving properly.
Are there any other settings I need to do besides turning it on and connecting it to the microcontroller via canbus?
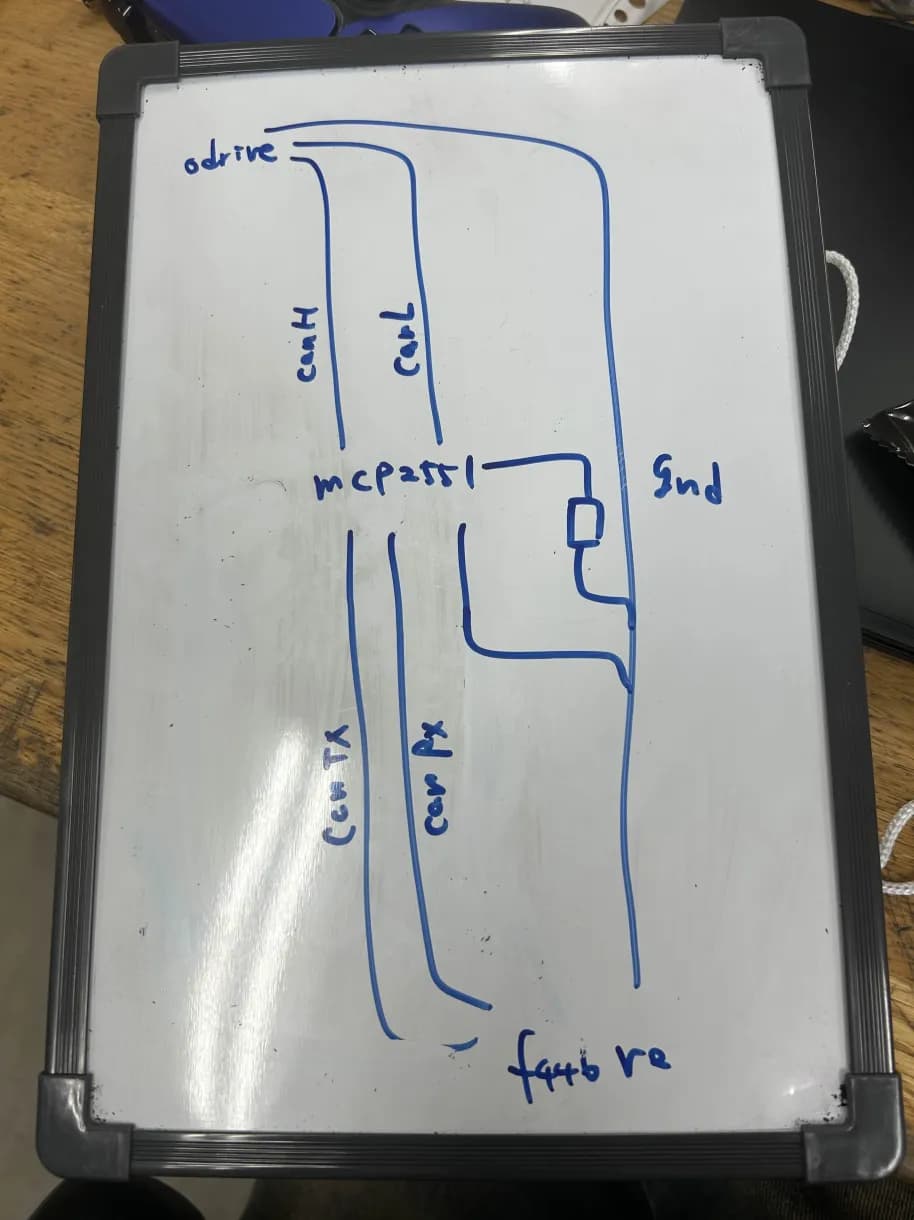
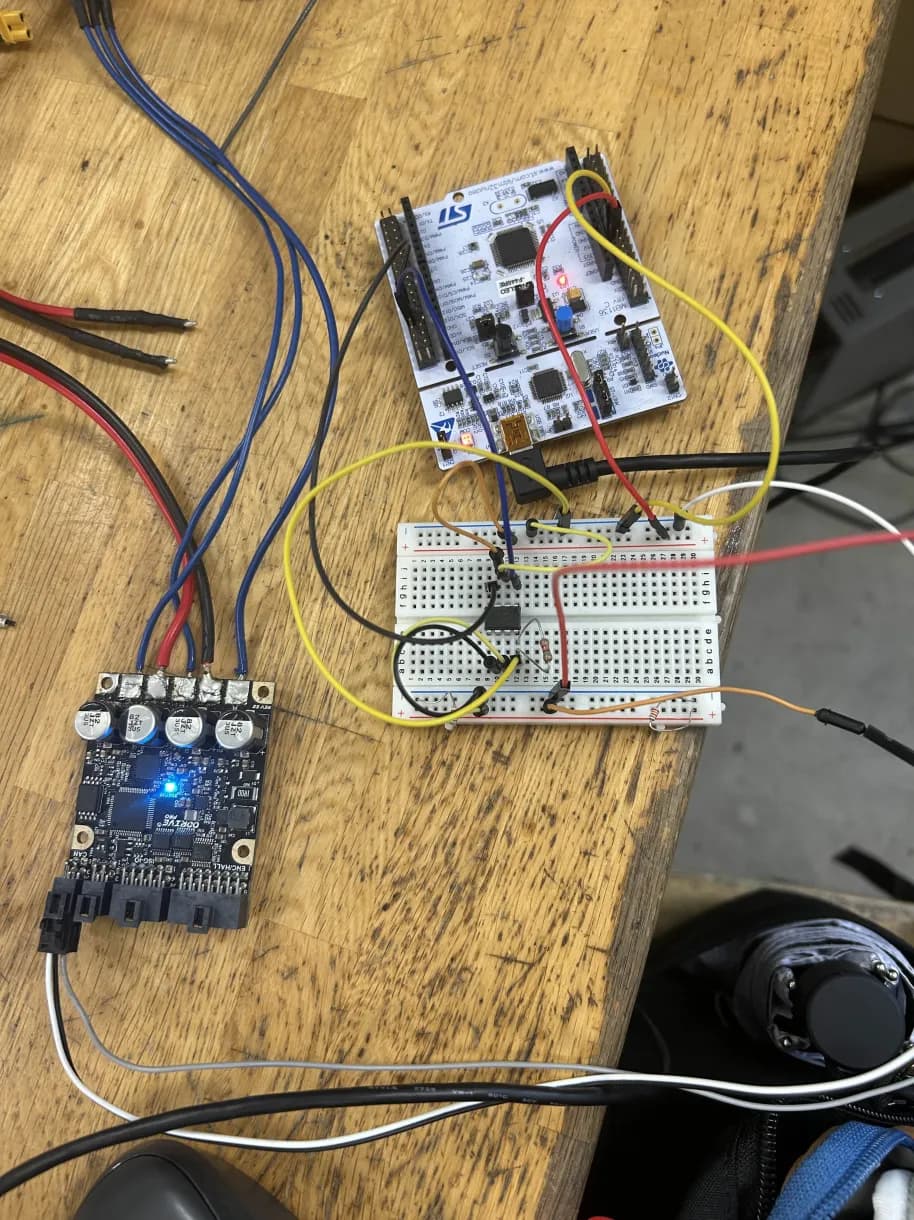
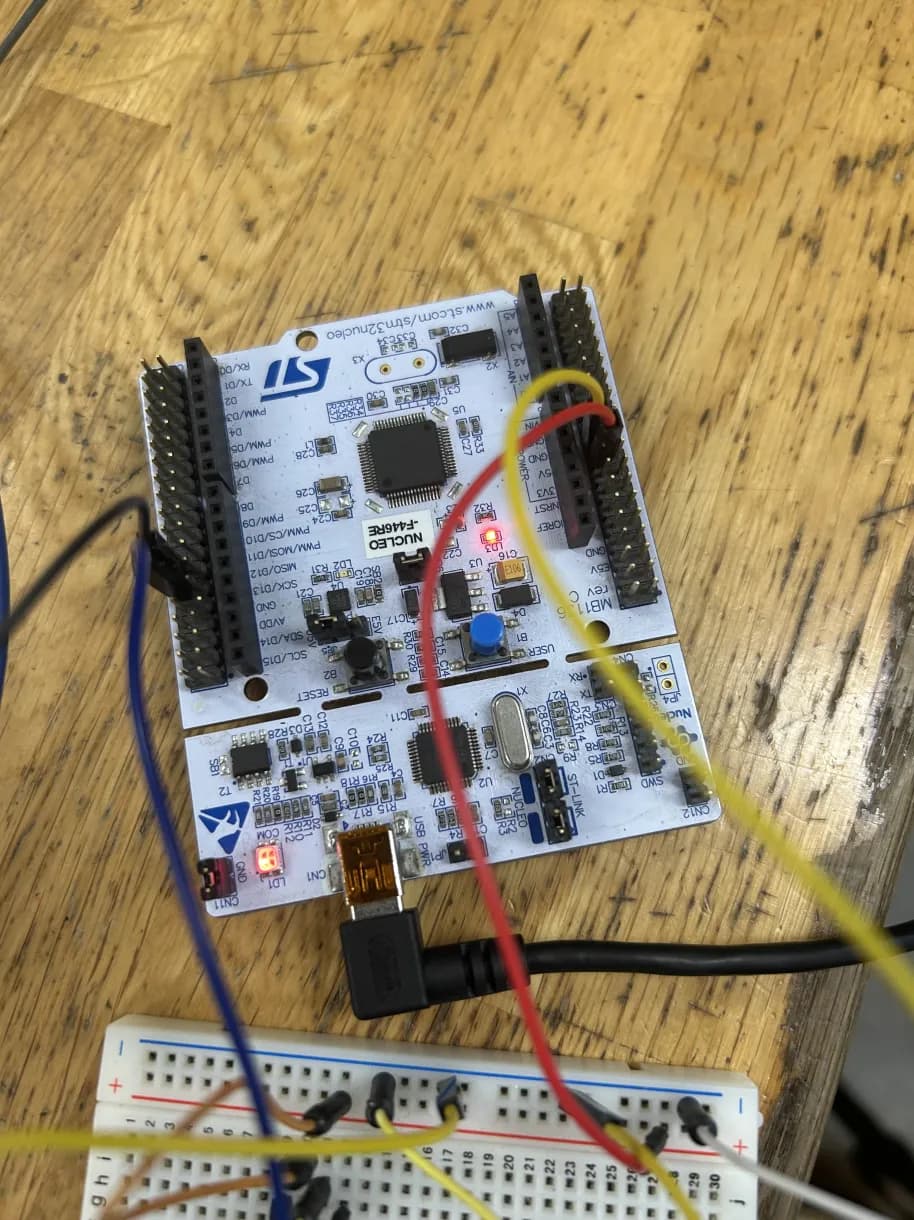
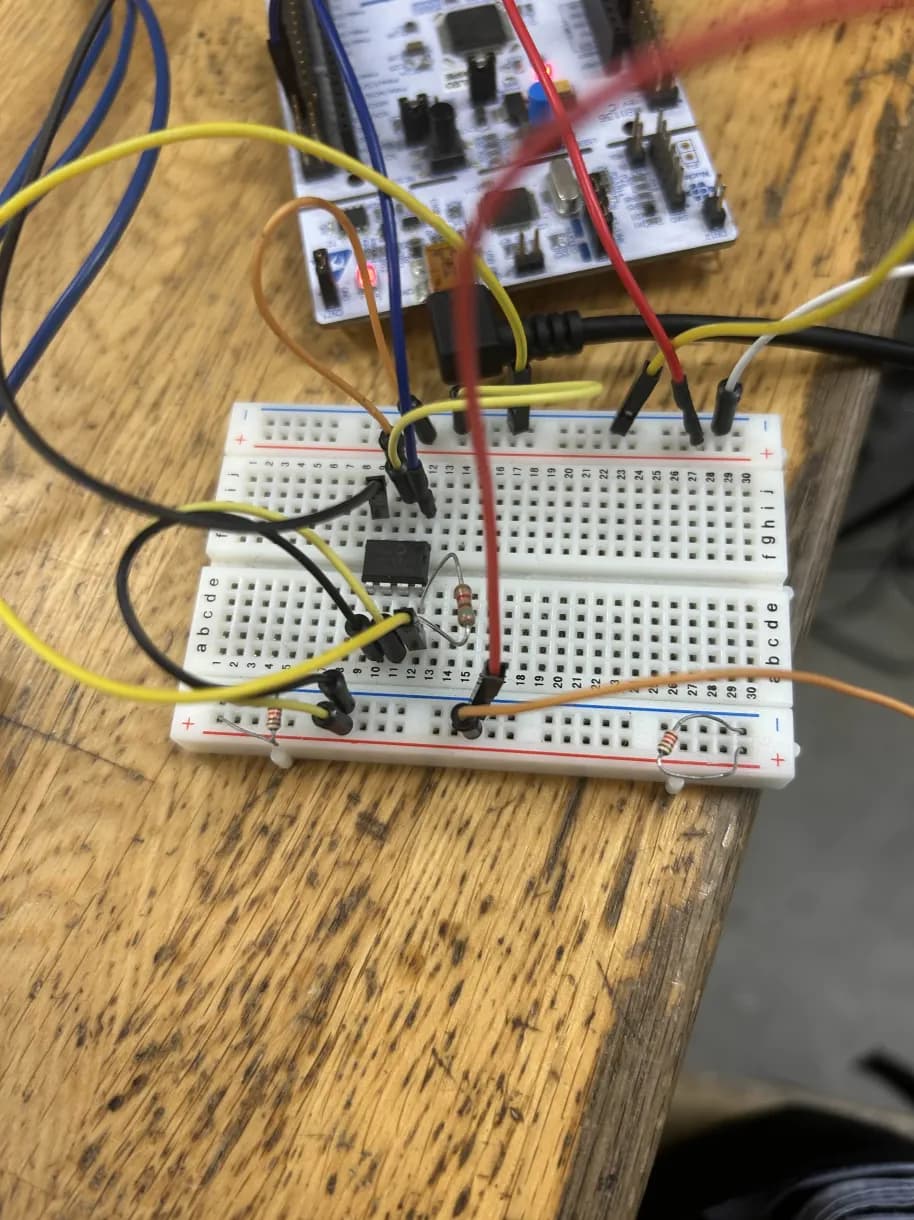
Perhaps it’s a grounding issue? Could you show some pictures of your wiring?
Thanks!
ODrive Pro needs a ground tie between CAN_GND and DC-, see: CAN Bus Guide — ODrive Documentation 0.6.11 documentation. That’s likely your issue here.
After correcting the wiring and checking the baud rate in the ODrive web GUI, I found that even though it was set to 250,000, it was still 1 Mbps, so I adjusted the microcontroller and it worked.
Thank you so much!!!
Wonderful!
I apologize for bothering you again. We’re having trouble getting the system to reliably enter closed-loop control mode during startup. Do we need to modify the initialization code?
Set_Controller_Modes(axis0, VELOCITY_CONTROL, PASSTHROUGH);
osDelay(10);
Set_Axis_Requested_State(axis0, ODRIVE_AXIS_STATE_CLOSED_LOOP_CONTROL);
No worries!
What’s specifically the issue here? Does the controller mode not get set reliably? Or does the ODrive not enter closed loop reliably?
I’m receiving the heartbeat signal, but the ODrive’s LED remains blue, so I don’t think it’s in closed-loop control mode.
Can you show the exact messages you’re sending as a result of Set_Controller_Modes and Set_Axis_Requested_State?
1 Like
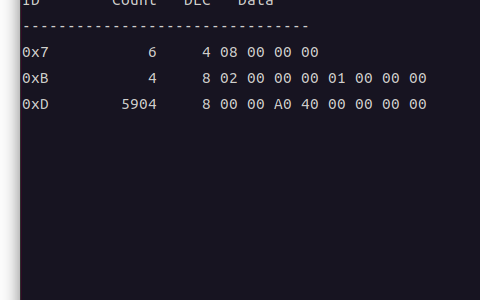
This is the result received by the can receiving module.
can0 00B [8] 02 00 00 00 01 00 00 00
can0 007 [4] 08 00 00 00
can0 00B [8] 02 00 00 00 01 00 00 00
can0 00B [8] 02 00 00 00 01 00 00 00
can0 007 [4] 08 00 00 00
can0 007 [4] 08 00 00 00