Hi, Just started using the ODrive. I am trying to run a DJI 3510 with an AS5047P.
Board version 3.4 48V.
Odrive: A,B,Z on m0
Runningdrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
The motor only goes round and round with no stop.
Any suggestions?
No worries I figured it out.
Is to bad that the odrive is so big. You should develop a small 1-axis board.
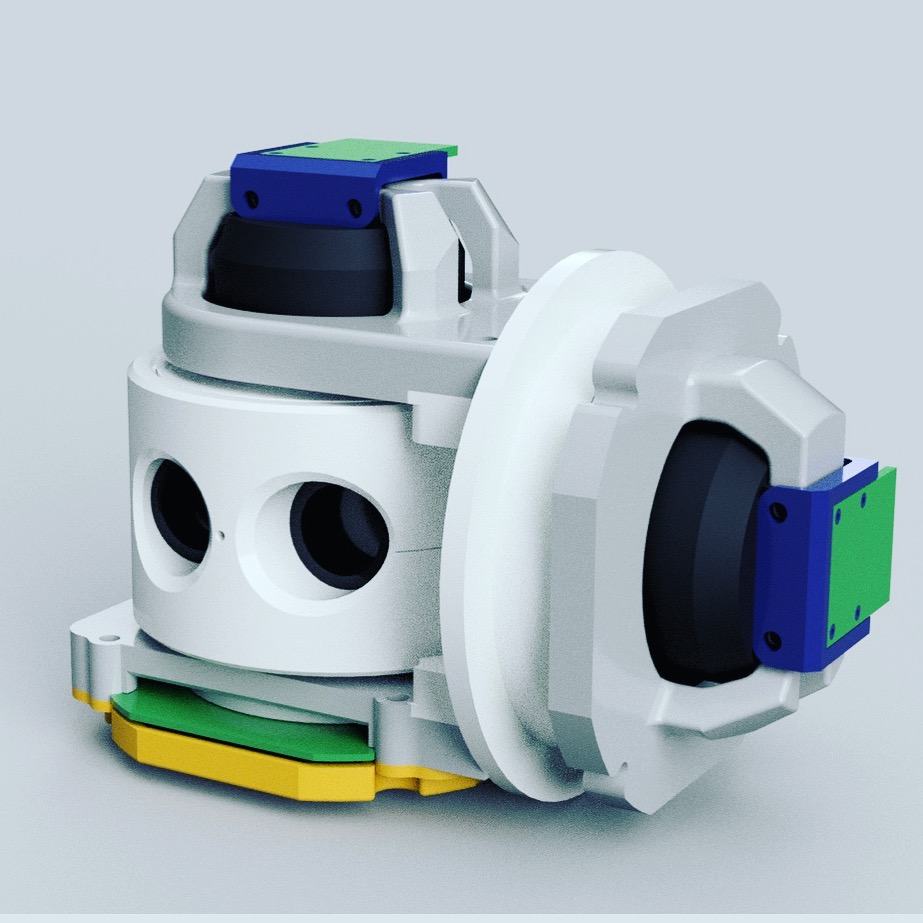
Here is what we are working on
A 2-axis LiDAR with wireless power between the rotating heads. Using IR to transfer data wirelessly.
What was the issue, btw?
A compact one-axis board is in the works!
Valify
July 7, 2018, 11:48pm
4
My problem is not yet solved 100%. The first problem was a cable to the encoder.odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL without any problem.
But when I try to runodrv0.axis0.controller.config.control_mode = CTRL_MODE_CURRENT_CONTROLodrv0.axis0.controller.current_setpoint = 2
or
odrv0.axis0.controller.config.control_mode = CTRL_MODE_VELOCITY_CONTROLodrv0.axis0.controller.vel_setpoint = 200
nothing happens. What am I doing wrong?
Cool. Looking forward to it. I was looking at https://github.com/bluerobotics/BlueESC
Did you manage to fix your second issue?
Valify
July 17, 2018, 7:43am
6
More or less yes. But still can’t find a way for low RPM.
What are your controller gains?