Hi All,
Odrive D6374 motor + AS5047p (AB, no I).
I went throught the following steps:
odrv0.axis0.motor.config.current_lim = 20
odrv0.axis0.motor.config.pole_pairs = 7
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.motor.config.current_lim_tolerance = 5
odrv0.config.brake_resistance = 2
odrv0.axis0.controller.config.control_mode = CTRL_MODE_POSITION_CONTROL
odrv0.axis0.encoder.config.cpr = 4000
odrv0.axis0.encoder.config.use_index = False
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
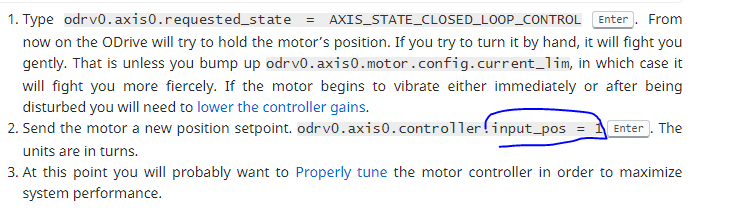
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
odrv0.axis0.encoder.config.pre_calibrated = True
odrv0.axis0.motor.config.pre_calibrated = True
odrv0.axis0.config.startup_encoder_index_search = False
odrv0.axis0.config.startup_closed_loop_control = True
odrv0.axis0.config.startup_sensorless_control = False
during FULL_CALIBRATION_SEQUENCE motor turns one direction, stops, then turns the opposite direction.
during CLOSED_LOOP_CONTROL motor holds its shaft.
no dump errors.
However,
when I try odrv0.axis0.controller.pos_setpoint = 100000 nothing happens.
Any idea what is wrong?
Thx.