Hello
when I run the “odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION”, motor did not make a sound, and display “ERROR_PHASE_RESISTANCE_OUT_OF_RANGE”.
I change the code into “test_voltage += (kI * current_meas_period) * (test_current - Ialpha)/40;”
I divided by 40 more than before after the expression, then it worked,but the motor resistance is not right. Can I do this?
The motor resistance measured with a multimeter is 0.2 ohm, motor is 900kv.
motor configuration is as follows:
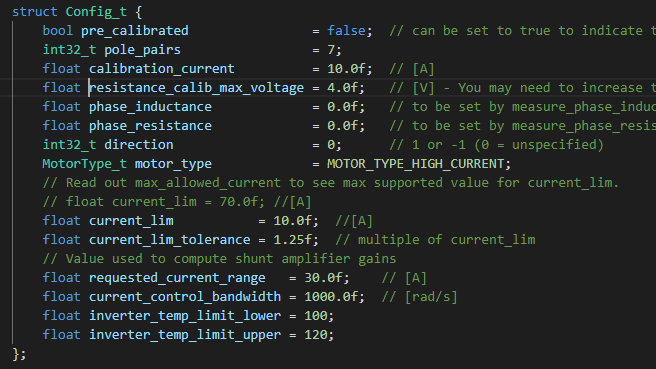
After that, I run the “odrv0.axis0.requested_state = AXIS_STATE_ENCODER_INDEX_SEARCH”, the motor operates with one shake and one shake, and heating.

I know why run the ENCODER_INDEX_SEARCH, the motor operates with one shakes, the gain is wrong. But how can I measue the right resistance. When I did nothing, it display the error ERROR_PHASE_RESISTANCE_OUT_OF_RANG. Thanks.
Have you read through the troubleshooting steps for that error? https://docs.odriverobotics.com/troubleshooting#common-motor-errors