Hi!
When I control my motor with velocity control mode, the motor starts spinning faster and faster, like a ramp. But even if I use the input mode passthrough, the behaviour is the system.
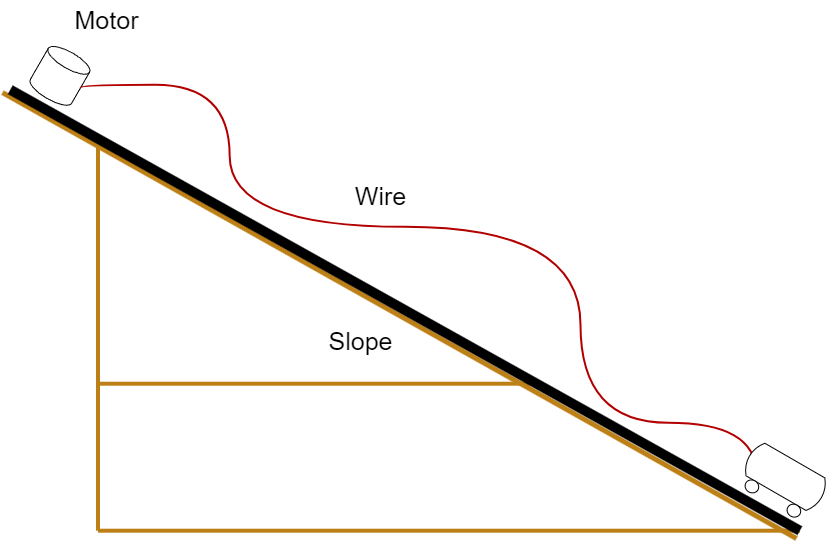
My exact setup is the following: two motors are at the top of a slope. They pull vertically (30° angle on a slope) a large weight. Because the weight is unbalanced, one motor starts turning faster than the other and thus the weight is not moving up horizontally.
I was using the position mode, so I try the velocity mode to have constant speed. But I did not get any improvement.
Do you have any idea ?
Thank you.
Simon
Hm. Are you calibrating the motor with the load attached? This sounds like a calibration issue – make sure to only calibrate with no load on the motor.
Hello!
The load is not attached but because of the system, the motor is tilted at 30° during the “calibration” with the Web GUI interface.
Hm, that should be fine. Can you provide a picture? What motor and encoder is this? Can you show screenshots of your configuration setup in the GUI?
I cannot share picture of the setup, sadly. But I made you this diagram (yeah, it’s pure beauty)
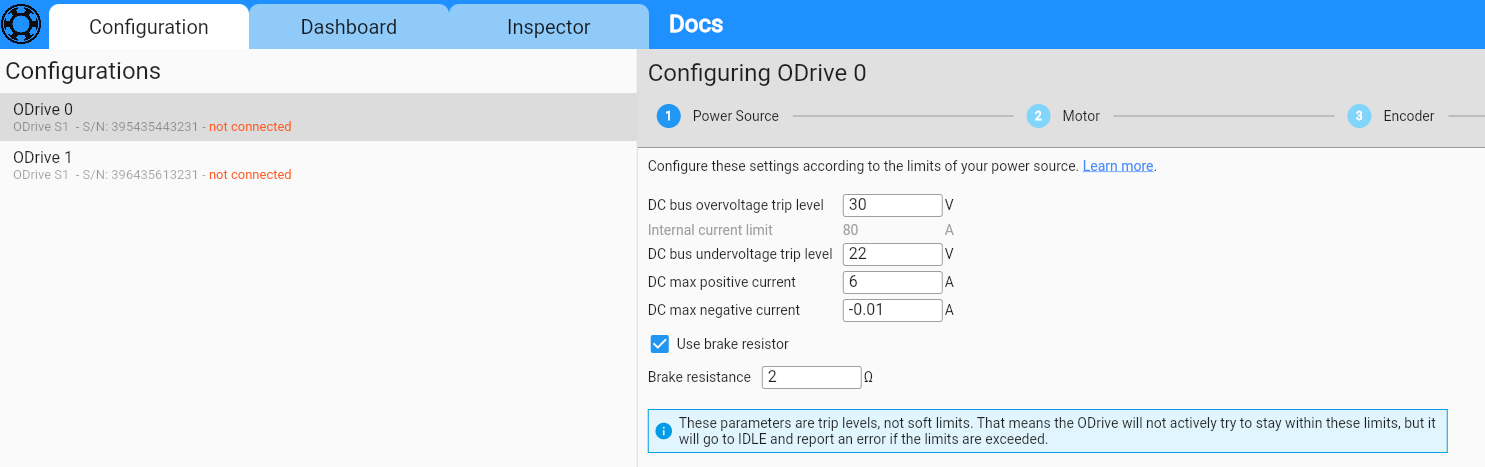
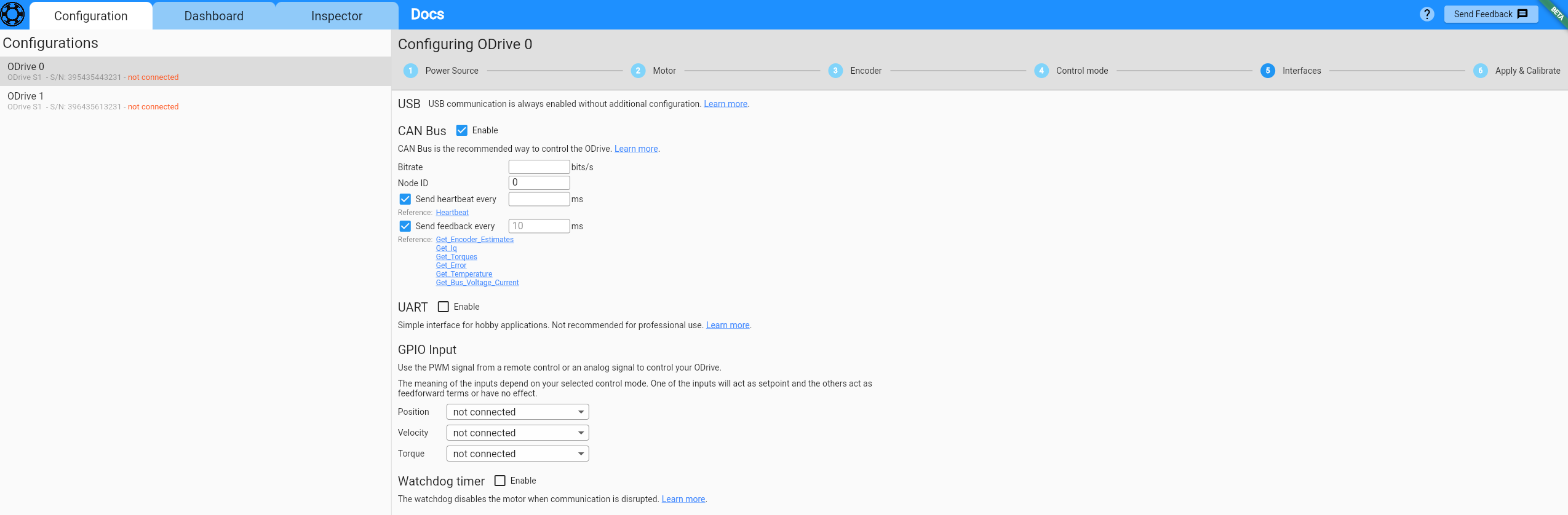
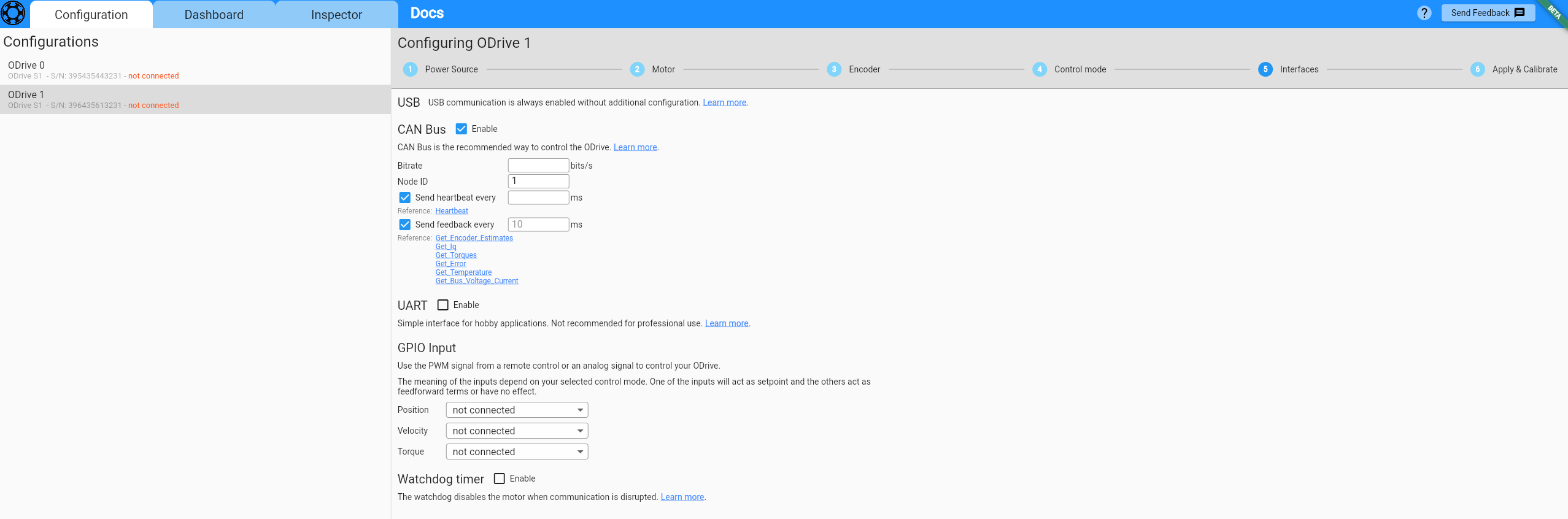
We use the ODrive S1 with the internal encoder. here below you can find screenshots
Note that we have increased the Hard velocity limit to 8
1 Like